
In-Mould-Labeling-Anlage zur Dekorierung von Kunststoffdeckeln
Beck Automation, Schweiz
Unternehmenszentrale Schweiz
Beckhoff Automation AG
Beck Automation, Schweiz
Automatische Teileentnahme und integriertes Handling sind in modernen Kunststoffproduktionsanlagen weit verbreitet. Hohe Flexibilität und geringe Entnahmezeit bei minimalem Bauraum sind die Anforderungen, die Kunststoffverarbeiter an die Transport- und Handlinganlagen stellen. Durch die langjährige Zusammenarbeit mit High-Perfomance- Spritzgießmaschinenherstellern bietet Beckhoff ein interessantes Produktspektrum insbesondere für die schnelle Teileentnahme und das In-Mold-Labeling. Aber auch beim konventionellen Spritzgießen zeigt Beckhoff innovative Lösungen: vom linearen, kartesischen Handling bis hin zu den Knickarm-Robotern. Mit dem Softwaretool TwinCAT Kinematic Transformation können diese und weitere spezielle Kinematiken programmiert werden. Ein umfangreiches Portfolio an Servomotoren und Verstärkern mit skalierbarer Leistung und in unterschiedlichen Formfaktoren stellt leistungsgerechte Lösungen für die verschiedenen Handhabungsgewichte bei minimaler Aufstellfläche zur Verfügung.
Unsere Servomotoren der Serie AM8000 basieren auf der One Cable Technology; für den Maschinenbauer vereinfacht sich hierdurch die Verdrahtung und er spart Kosten bei der flexiblen Verkabelung in Schleppketten. Die schnelle Feldbustechnologie EtherCAT, kombiniert in einem Kabel mit der Energieversorgung der Motoren, reduziert den Schaltschrankplatz auf Null.
Für die dezentrale Datenerfassung an Roboterarmen eignen sich die EtherCAT-Box-Module. Dabei sind spezielle Erfassungsfunktionen, wie z. B. die Pneumatikdrucküberwachung für die Greiferelemente, optimal auf Handlingapplikationen zugeschnitten. Für kostengünstige Anwendungen bietet Beckhoff die EtherCAT-Box-Module in der Ausführung mit D-Sub-Steckverbindern; durch den Einsatz von EtherCAT P wird zusätzlich die Verkabelung für die Energieversorgung eingespart.
Die hohen Anforderungen an die Flexibilität von Handlinggeräten, in Kombination mit ständig steigenden Normen für die Maschinensicherheit, werden mit den unserenSafety-Produkten perfekt abgedeckt. Sie profitieren von unserer langjährigen Erfahrung mit Sicherheitstechnologie. Die Entwicklung des sicheren Protokolls Safety over EtherCAT geht zurück auf das Jahr 2005. Die dezentralen Safety-Komponenten vereinfachen die Konstruktion und Inbetriebnahme in unterschiedlicher Maschinenumgebung. Sie eignen sich z. B. optimal für die Überwachung von Schutztüren und Lichtschranken. Mit TwinSAFE, der in der TwinCAT-Engineering-Workbench integrierten Sicherheitstechnik, stehen zertifizierte Sicherheitsfunktionsbausteine zur Verfügung. Sie ermöglichen eine an die Kundenwünsche angepasste, flexible Konfiguration der Anlagenkomponenten vor Ort. TwinSAFE enthält alle wichtigen Sicherheitsfunktion für die Anwendung in Handlinggeräten, wie z. B. die sicher begrenzte Geschwindigkeit oder die sichere Überwachung der Bremsen in den Antriebsmotoren.
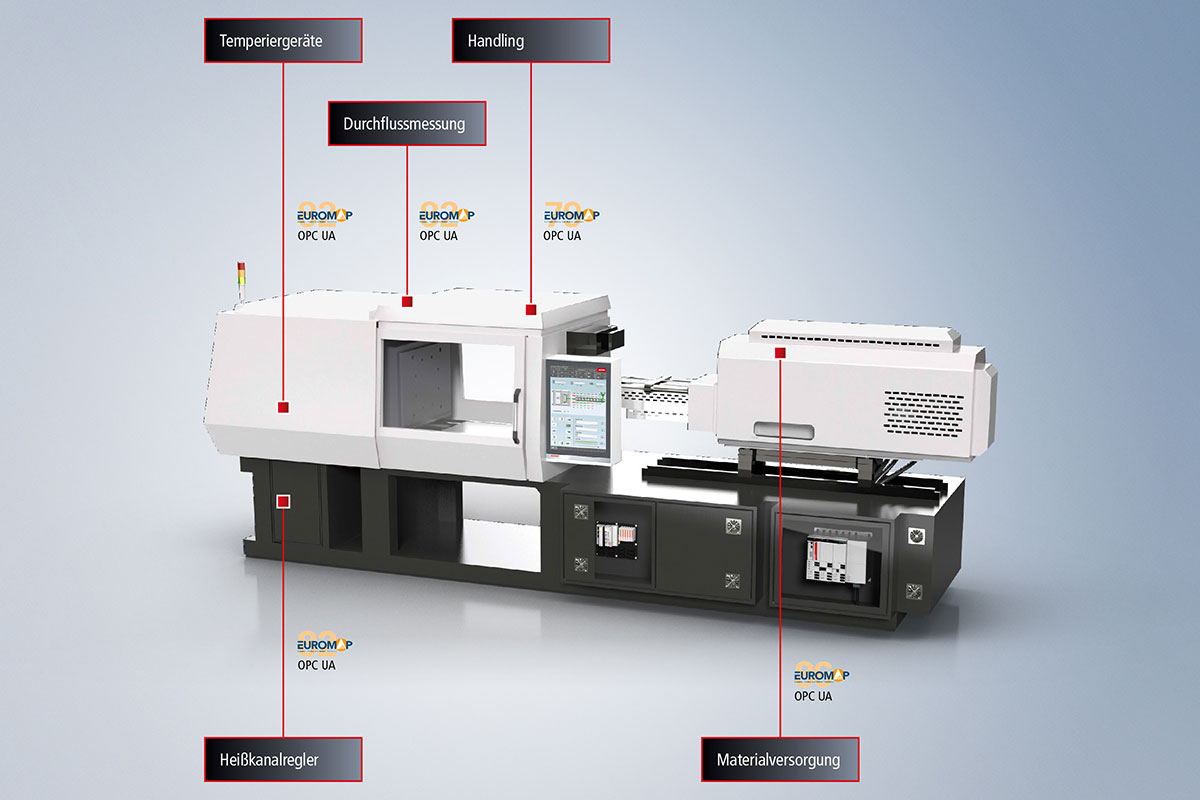
Für die Kommunikation mit den Spritzgießmaschinen bietet Beckhoff die bekannte Euromap-67-Schnittstelle. Für die zukünftige OPC-UA-basierte Schnittstelle Euromap 79 (OPC 40079) bietet Beckhoff ein leistungsfähiges Engineering-Tool in TwinCAT; der Maschinenbauer kann damit die Datenpunkte schnell und einfach den Euromap-Objekten zuordnen. Neben den OPC-UA-basierten Euromap-Schnittstellen für den Austausch von Parametern und Fertigungsinformationen empfiehlt Beckhoff für zeitkritische Prozesse, wie z. B. der Robotersynchronisation im Hochleistungsspritzguss, unbedingt den Einsatz von EtherCAT als deterministischer Feldbusverbindung zwischen Spritzgießmaschine und Handling.

Lineare Handlingsysteme sind insbesondere in Kombination mit Spritzgießmaschinen weit verbreitet. Sie zeichnen sich durch einen robusten, einfachen Aufbau aus und eignen sich für eine große Bandbreite unterschiedlicher Handhabungsgewichte. Die Anforderungen an Entnahmesysteme seitens der Kunststoffverarbeiter sind: eine möglichst geringe Aufstellfläche für Schaltschränke, einfache Programmierung sowie die Integration der Bedieneroberflächen mobiler Panels in die Steuerung der Spritzgießmaschine. Darüber hinaus wünscht der Maschinenbauer die Abbildung seiner modularen Konstruktion in Hardware und Software mit Hilfe kosteneffizienter Lösungen. Standardisierte Euromap-Schnittstellen sowie ein schneller Feldbus sollen den Einsatz in der ganzen Bandbreite der Kunststoffteileproduktion ermöglichen.
Beckhoff erfüllt diese Anforderungen durch ein umfangreiches Spektrum an Hard- und Software-Produkten:
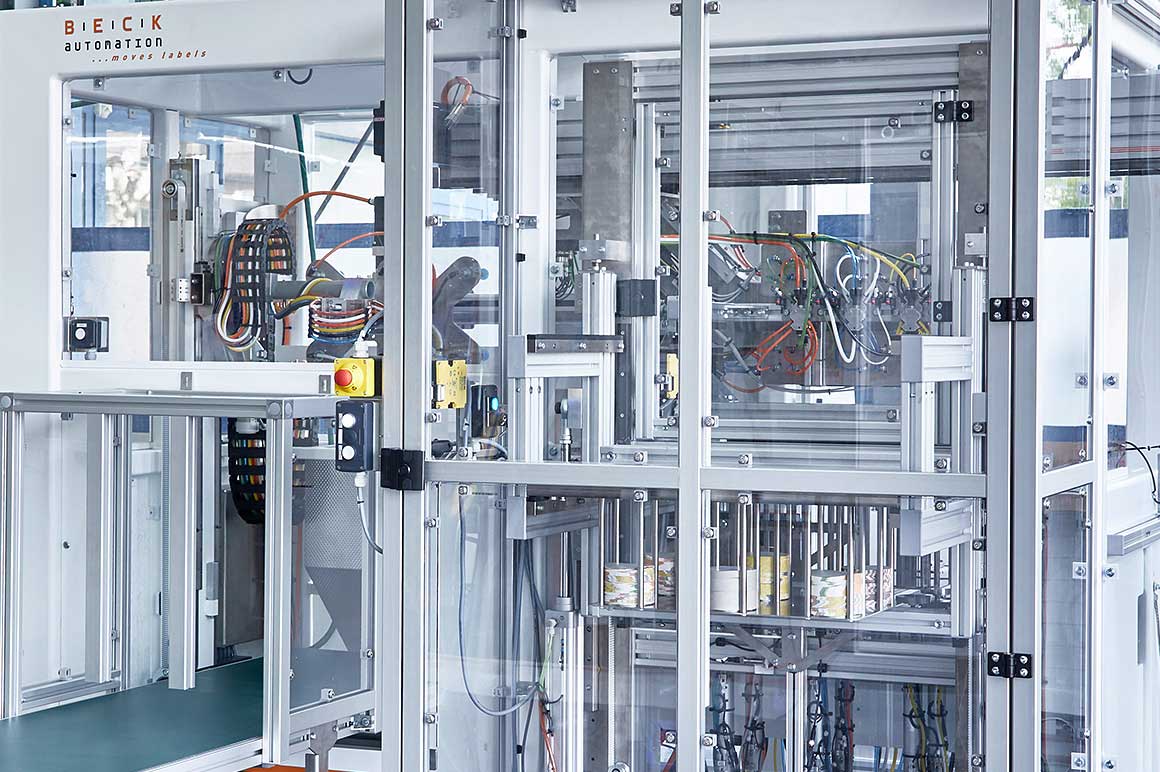
Speziell beim Verpackungsspritzgießen ist die schnelle Teileentnahme und integrierte Dekoration (In-Mold-Labeling) ein wachsender Markt. Entscheidend für den Markterfolg in diesem Verarbeitungssegment ist die Produktivität, d. h. kurze Zykluszeiten von Maschinen und Entnahmeeinheiten. Beckhoff liefert seit vielen Jahren hochperfomante Steuerungen für Husky-Spritzgießmaschinen und verfügt damit über reiche Erfahrungen bei Anlagen für Hochleistungsspritzgießen mit extrem kurzen Zykluszeiten.
Beckhoff erfüllt diese Anforderungen durch ein großes Angebot an Hard- und Softwareprodukten:

Knickarm-Roboter werden bei Blasformmaschinen u. a. zur Führung des extrudierten Schlauchs genutzt; bei Spritzgießanwendungen kommen sie beispielsweise zum Handling großer Teile in kleinen Arbeitsräumen zum Einsatz. Da die Roboter in der Produktionsumgebung auf der einen Seite mit Spritzgießmaschinen und auf der anderen Seite mit weiteren Nachfolgestationen zusammenarbeiten, ist eine einfache Integration mit schneller Datenkommunikation entscheidend für die Zellen-Produktivität.
In Knickarm-Robotern wird häufig EtherCAT als Standard für schnelle interne Kommunikation genutzt. Damit kann unsere Hard- und -Software perfekt in das Umfeld der Knickarm-Roboter integriert werden. Für Kuka- und Stäubli-Roboter liefern wir, gemäß den herstellerspezifischen Datenaustauschverfahren basierend auf EtherCAT, die entsprechenden Softwareschnittstellen: für Kuka KR-C4-Robotern mxAutomation, für Stäubli-Roboter die uniVAL PLC.
Als durchgängige Softwareplattform ermöglicht TwinCAT die Programmierung von SPS und Robotik in einer Engineering-Umgebung. Während des Betriebs werden Verfahrkommandos an den Roboter sowie Istpositionen in Echtzeit übertragen. Das gesamte Beckhoff I/O-Portfolio steht zur Integration der Knickarm-Roboter in unterschiedliche Produktionsumgebungen zur Verfügung: von den einfachen digitalen I/Os über sicherheitsgerichtete Überwachungen bis zur Messtechnik oder der Bildverarbeitung: Damit wird der Knickarm-Roboter zum Teil des „Ökosystems“ TwinCAT von Beckhoff.
Besonders interessant für Anwendungen in der Umgebung von Knickarm-Robotern sind die folgenden Produkte von Beckhoff:

Mit unserer PC-basierten Steuerungstechnik bieten wir für alle Bereiche der Automatisierung von Kunststoffmaschinen umfassende Systemlösungen in verschiedenen Leistungsklassen an. Das Grundprinzip beruht auf einem leistungsfähigen Industrie-PC, einer performanten Feldbusanschaltung mit den angeschlossenen Peripheriegeräten für Sensorik und Aktorik sowie der Software TwinCAT für Engineering und Echtzeitsteuerung. Ergänzt wird die Steuerungsplattform durch ein umfangreiches Portfolio an Antriebstechnikkomponenten. TwinCAT bündelt alle notwendigen Funktionalitäten wie SPS, Motion Control, Robotik, Messtechnik, Bildverarbeitung und HMI in einer Software. Basierend auf IT-Standards verfügt unsere Steuerungslösung über die notwendige Offenheit, um intelligente Produktionskonzepte gemäß Industrie 4.0 zu realisieren.
Aufgrund der Leistungsstärke moderner Prozessoren, wie wir sie in allen PC-Serien verbauen, können rechenintensive Anwendungen problemlos in die Steuerungsplattform integriert werden. Kunststoffmaschinenhersteller profitieren vom kontinuierlichen Leistungszuwachs der Prozessoren: Kürzere Abtastzeiten steigern schon heute die Qualität des Endprodukts und bilden in Zukunft die Voraussetzung zur Realisierung selbstlernender Maschinen. Die Möglichkeit, beispielsweise eine Spritzgießmaschine komplett zu simulieren im virtuellen Designprozess, spart Zeit bei der Entwicklung und der Inbetriebnahme.

Die EtherCAT-Technologie wurde 2003 von uns auf den Markt gebracht und als offener Standard der Automatisierungstechnik zur Verfügung gestellt. Mit herausragender Leistung, flexibler Topologiewahl, umfangreicher Diagnose und einfacher Konfiguration eignet sich EtherCAT optimal für den Einsatz in Kunststoffmaschinen. Wir liefern die größte Anzahl von EtherCAT-kompatiblen Automatisierungsmodulen sowohl für I/Os als auch für die Antriebstechnik.
In der Kunststofftechnik gehört EtherCAT zu den am meisten genutzten Standards. Es steht eine große Anzahl EtherCAT-kompatibler Sensoren und Aktoren im Markt zur Verfügung, wodurch eine hohe Investitionssicherheit gewährleistet ist. Besonders interessant für elektrisch angetriebene Spritzgießmaschinen ist die problemlose Anbindung von Verstärkern von Drittanbietern. Auch andere Feldbussysteme können als Kommunikationslayer über EtherCAT eingebunden werden.
Die schnelle und hochpräzise Technologie eXtreme Fast Control (XFC) basiert auf EtherCAT und speziellen, für XFC optimierten I/O-Baugruppen, die mit hoher Genauigkeit Signale aufnehmen bzw. Aktionen auslösen. Mit I/O-Response-Zeiten unter 100 μs ermöglicht XFC sehr schnelle und deterministische Reaktionen und trägt damit zur Prozessoptimierung bei.

Mit TwinSAFE haben wir ein durchgängiges Sicherheitskonzept umgesetzt, das sichere Funktionalitäten in die nicht sicherheitsgerichtete Steuerungsarchitektur integriert. Separate Sicherheitssteuerungen werden damit überflüssig. Die typischen Sicherheitsfunktionen sind in der TwinSAFE-Logic EL6910 oder der kompakten Safety-Steuerung EK1960, auf Basis von Standard-Safety-Funktionsbausteinen, entsprechend den Sicherheitsanforderungen, programmier- bzw. konfigurierbar. Mit unserer Safety-Lösung wird der Engineering-Prozess beschleunigt, da sich die sicherheitsgerichteten Erfordernisse unterschiedlicher Maschinenkonfigurationen per Software realisieren lassen. Alle Beckhoff Sicherheitssteuerungen eignen sich für Anwendungen bis SIL 3 nach IEC 61508 bzw. Performance-Level e der ISO 13849-1 und erfüllen so die Norm DIN EN 201 für Spritzgießmaschinen.
Über die TwinSAFE-I/O-Module wird die Sicherheitstechnik nahtlos in den Klemmenstrang integriert, wobei sich sichere Signale beliebig mit Standardsignalen mischen lassen. Hiervon profitieren Blasformmaschinen oder Produktionszellen mit Schaltschränken an unterschiedlichen Montageorten. Dank ihrer Skalierbarkeit eignet sich unsere Safety-Lösung sowohl für ausgedehnte Anlagen als auch für kleine Spritzgieß- und Blasformmaschinen. Hier reicht eine Safety-Logic, um die komplette Sicherheitstechnik zu realisieren. Besonders geeignet für Spritzgießmaschinen mit hydraulischen und/oder elektrischen Antrieben ist die kompakte Safety-Steuerung EK1960. Sie erlaubt die direkte Ansteuerung digitaler Schaltventile mit 2 A Last, wie sie z. B. in Kernzügen zum Einsatz kommen. Mit der TwinSAFE-SC-Technologie lassen sich Signale mit niedrigem Safety-Level redundant für sicherheitstechnische Aufgaben nutzbar machen.


1995 hat Beckhoff die Busklemme auf den Markt gebracht, die sich seitdem zu einem der wichtigsten Technologiestandards der Automatisierungstechnik entwickelt hat. Im Jahr 2003 folgte die Entwicklung des schnellen Kommunikationssystem EtherCAT. Von Beckhoff als offenes System auf den Markt gebracht, wurde es innerhalb weniger Jahre zu einem Weltstandard in der Automatisierung. Anwendern steht ein umfangreiches EtherCAT-I/O-Klemmenportfolio zur Verfügung, das sowohl hinsichtlich seiner Leistungsfähigkeit als auch seiner Varianz hervorragend geeignet ist, um jede Funktionalität in Kunststoffmaschinen und deren Peripherie zu automatisieren.

Mit der EtherCAT Box kommt die EtherCAT-Technologie ohne Schaltschrank zum Einsatz. Die Module der IP67-Serie haben durchgängig ein direktes EtherCAT-Interface, d. h. die hohe Performance bleibt bis in jedes Modul erhalten. Dies eröffnet in der IP67-Welt eine schnelle Prozessdatenkommunikation mit XFC, hochgenaue Messtechnik und integrierte Antriebstechnikfunktionen direkt im Feld. Die robuste Bauweise der EtherCAT-Box-Module erlaubt ihren Einsatz direkt an der Maschine. Schaltschrank und Klemmenkasten werden nicht mehr benötigt. Neben den robusten M12-Schraubverbindern werden für kostensensitive Anwendungen auch D-Sub-Steckverbinder angeboten, die für Handlinganwendungen perfekt geeignet sind.

Die Beckhoff Antriebstechnik stellt, in Kombination mit den Motion-Control-Lösungen der Automatisierungssoftware TwinCAT, ein vollständiges Antriebssystem für alle Anwendungen in der Kunststofftechnik dar. Mit EtherCAT als schnellem Kommunikationssystem eignet sie sich für ein- und mehrachsige Positionieraufgaben mit hochdynamischen Anforderungen. Aufgrund ihrer Skalierbarkeit ermöglicht unsere Antriebstechnik Ihnen die leistungsgerechte Auslegung Ihrer Antriebslösung.
Ein Höchstmaß an Performance und Dynamik bieten die Servoverstärker-Baureihen AX5000 und AX8000 mit leistungsfähiger EtherCAT-Systemkommunikation. Die integrierte, schnelle Regelungstechnik der AX-Baureihen unterstützt die Ausführung hochgenauer Positionieraufgaben, wie sie zum Beispiel im Bereich der Folienherstellung erforderlich sind: Die Glättwalzen, welche die extrudierte Folie vor dem Aufwickeln glätten, müssen im Submillimeterbereich verstellbar sein. Für ultraschnelle Entnahmevorgänge bietet der AX5000 die optimale Lösung. Das flexible Konzept des AX5000 mit 1- und 2-Kanaleinheiten sowie die variable Motorleistung sorgen für ein kostenoptimales Design. Für kompakte, modulare Antriebseinheiten und für kartesische Handlinggeräte sind die Verstärker aus der AX8000-Serie prädestiniert.
Im unteren Leistungsbereich stellen die EtherCAT-Servoklemmen, die einen kompletten Servoverstärker im Standardklemmengehäuse bieten, eine ebenso preiswerte wie kompakte Antriebstechniklösung für niedrige Teilegewichte oder Zusatzaggregate mit geringer Leistungsaufnahme dar.
Unsere Antriebstechnik zeichnet sich durch ihre enorme Fertigungstiefe aus: Die Servoverstärker und Motoren kommen „aus einer Hand“, d. h. die Verstärker werden am Produktionsstandort in Verl produziert, während die Motoren in einem zur Beckhoff Gruppe gehörenden Unternehmen entwickelt und produziert werden. So folgen alle Antriebstechnikkomponenten einem durchgängigen Engineeringkonzept. Das umfangreiche Programm an linearen und rotatorischen Motoren ist optimal auf unsere Servoverstärker zugeschnitten. Ein Ergebnis dieser erfolgreichen Entwicklungszusammenarbeit ist zum Beispiel die One Cable Technology der Motorenserie AM8000, die Power- und Feedbacksystem in einem Standardkabel zusammenfasst. Hierdurch verringert sich der Einbauraum an der Maschine und die Inbetriebnahmekosten werden gesenkt. Eine weitere technische Innovation als Ergebnis dieser engen Zusammenarbeit ist das dezentrale Servoantriebssystem AMP8000. Es integriert den Servoantrieb in kompakter Bauform in den Servomotor.
Unsere Antriebstechnikkomponenten sind nahtlos in das Engineeringtool TwinCAT integriert. Die Motion-Control-Softwarepakete TwinCAT NC-PTP, NC I und TwinCAT 3 Kinematic Tranformation sind perfekt auf die Servoverstärker und Motoren abgestimmt. Durch die integrierte Sicherheitstechnik erfüllen die Servoverstärker die hohen Anforderungen an die Maschinensicherheit von Kunststoffmaschinen und erleichtern die Konfiguration von Produktionszellen.
Für die Neuentwicklung von Maschinen hat Beckhoff Tools zur Auslegung von Motoren und Getrieben in TwinCAT integriert. Bei komplexen Anwendungen oder bei der Konstruktion neuer Anlagen bietet Beckhoff auch Unterstützung bei der Auslegung von Motoren und Getrieben an. Sie profitieren so von der langjährigen Expertise unserer Ingenieure in unterschiedlichen Antriebsapplikationen.

Das dezentrale Servoantriebssystem AMP8000 eröffnet neue Möglichkeiten für modulare Maschinenkonzepte: Der AMP8000 integriert den Servoantrieb in sehr kompakter Bauform direkt in den Servomotor. Durch die Verlagerung der Leistungselektronik direkt an die Maschine reduziert sich der Platzbedarf im Schaltschrank auf ein einziges Koppelmodul, das mit nur einem Kabel über ein Verteilermodul mehrere dezentrale Servoantriebe versorgt. Eine weitere Ausbaustufe eliminiert den für die Antriebstechnik erforderlichen Schaltschrankraum vollständig. Reduzierte sich der Anschluss der Antriebe an den Schaltschrank mit den Koppelmodulen auf nur eine Leitung, entfällt sie beim Einsatz des Versorgungsmoduls AMP8620 komplett.
In der Kunststoffverarbeitung eignet sich das AMP8000 für zahlreiche Anwendungen. Drehwerkzeuge in der Mehrkomponenten-Spritzgießtechnik lassen sich ohne zusätzlichen Schaltschrankbauraum integrieren. Das erleichtert auch die Nachrüstung bestehender Anlagen. Handlinggeräte für Spritzgießmaschinen oder Blasformmaschinen können mit AMP8000 ohne einen zusätzlichen Schaltschrank angebaut werden. Das gilt auch für komplette Produktionszellen mit typischerweise eingeschränktem Footprint. Eine besonders interessante Anwendung für das Maschinendesign sind auch die Blasstationen bei Streckblasmaschinen.

Mit dem XPlanar-System eröffnet Beckhoff neue Wege in der Anlagenkonstruktion: Über beliebig angeordnete Planarkacheln schweben die Planarmover ruck- und berührungsfrei. Sie lassen sich mit bis zu 4 m/s Geschwindigkeit, 2g Beschleunigung und 50 µm Positionierwiederholgenauigkeit zweidimensional verfahren − und das geräuschlos und ohne Abrieb.
Das bedarfsgerecht skalierbare Planarmotorsystem kann die Konzeption von Maschinen und Anlagen deutlich vereinfachen und eröffnet neue Freiheiten beim Maschinendesign. Durch die maximal flexible Moverpositionierung und die sehr hohe Bewegungsdynamik lassen sich beispielsweise Produktströme sehr einfach und individuell teilen. Wo bisher Roboter oder andere unflexible Mechanikvorrichtungen zum Einsatz kamen, bietet das XPlanar eine effiziente und flexible Lösung. Mit dem berührungslosen Verfahren der Mover entfallen zudem Verschleiß, Emissionen und das Verschleppen von Verunreinigungen. Optimal eignet sich das XPlanar daher auch für Anwendungen mit hohen Hygienestandards, wie sie beispielsweise beim Transport empfindlicher Werkstücke einzuhalten sind.
Die erste Anwendung des XPlanar in der Kunststoffindustrie wurde von Plasmatreat in einer Anlage zur Plasmabeschichtung von Kunststoffteilen realisiert: Die Planarmover verfahren die Kunststoffteile hochgenau zu verschiedenen Verarbeitungsstationen.

TwinCAT integriert sämtliche Engineering- und Runtime-Prozesse auf einer zentralen Softwareplattform. Dies gilt für Programmierung, Konfiguration, Echtzeitumgebung und alle Runtime-Module. Durch die Programmierung in den gängigen IEC-SPS-Dialekten und der Integration von C/C++-Algorithmen kann der Maschinenbauer – abhängig von der Qualifikation der Programmierer, der Servicestrategie und des Know-how-Schutzes – die am besten geeignete Programmiermethode frei wählen. Mit der Integration von MATLAB® und Simulink® werden Reglerkonzepte modellbasiert entwickelt und leisten damit ihren Beitrag zur virtuellen Maschinenkonstruktion. Durch die Verwendung von Microsoft Visual Studio als einheitlicher Programmierer-Workbench werden unterschiedliche Versionsverwaltungssysteme unterstützt und das Arbeiten im Team vereinfacht. Für die Serienproduktion bietet TwinCAT mit dem Automation Interface offene Schnittstellen für die Integration kommerzieller IT-Systeme zur Maschinenprogrammgenerierung.

Motion Control ist seit vielen Jahren ein wichtiger Bestandteil der Beckhoff Software-Engineering-Tools. Mit TwinCAT PTP und TwinCAT NC I werden die Anforderungen elektrischer Antriebstechnik in Kunststoffmaschinen und deren Peripherie perfekt abgedeckt. Verschiedene Softwaremodule für unterschiedliche Aufgabenstellungen, wie z. B. Kurvenscheiben, Synchronisation und interpolierende Bewegung mehrerer Achsen, stehen zur Verfügung. Für die stark verbreiteten, kartesischen Entnahmesysteme ist NC PTP perfekt geeignet; eine Integration in die Maschinensteuerung der Verarbeitungsmaschine ist problemlos realisierbar. Für Stand-alone-Handlinganwendungen stehen die TwinCAT Plastic Application Components zur Verfügung. Als branchenspezifische Erweiterung von TwinCAT unterstützten sie die weit verbreiteten Euromap-Schnittstellen zwischen Spritzgießmaschine und Roboter, entweder als Euromap 67 oder − zukünftig − als Euromap 79 (OPC 40079). Schnelle Entnahmeprozesse, wie z. B. das In-Mold-Labeling mit Hilfe von Seitenentnahmehandling, werden mit der PC- und EtherCAT-basierten Steuerungstechnik optimiert: EtherCAT als Feldbus mit quasi verzögerungsfreier Synchronisation führt zu extrem kurzen Zykluszeiten.
Der Philosophie der offener Automatisierungstechnik folgend, steht mit TwinCAT Motion Control ein Tool zum Entwurf von Produktionszellen zur Verfügung, das die Einbindung unserer Antriebskomponenten aber auch Komponenten von Drittanbietern erlaubt. TwinCAT NC-PTP ist das passende Engineering-Tool für eine Vielzahl von Antriebskonzepten: von einfachen geschalteten Achsen über Schrittmotoren oder Frequenzumrichter bis hin zu Servoantrieben. Unterschiedliche Encoder-Technologien mit Feldbusschnittstellen oder Direktanbindung über I/Os werden unterstützt. Damit lassen sich Produktionszellen − entsprechend den Markerfordernissen − modular, flexibel und kostenoptimal gestalten.
Insbesondere die Verkettungsmöglichkeiten von Master- und Slaveachsen in nahezu beliebigen Strukturen sowie die leistungsfähigen und vielfältigen Motion-Funktionen von TwinCAT decken unterschiedliche Anwendungsspektren hervorragend ab. Mit der Softwarebibliothek Fliegende Säge lassen sich beispielsweise Ablängeinheiten bei Extrusionslinien perfekt synchronisieren. Leistungsfähige Tools, wie das TwinCAT CAM Design Tool und das TwinCAT Scope, unterstützen das Maschinendesign und die Inbetriebnahme. SPS-Bibliotheken mit Bausteinen nach dem PLCopen-Motion-Control-Standard erleichtern die Programmierung und sparen Engineering-Aufwand durch die Wiederverwendbarkeit der Module.

Die Software TwinCAT Kinematic Transformation integriert die Robotersteuerung in die Automatisierungssoftware, sodass SPS, Motion Control und Robotik auf einem Industrie-PC zum Ablauf kommen. Mit TwinCAT steht dem Anwender ein einheitliches Engineering-Werkzeug für die Konfiguration und Programmierung zur Verfügung. Das spart Zeit und eliminiert Schnittstellenprobleme und senkt gleichzeitig die Entwicklungskosten. Neben dem Kartesischen Portal, der seriellen 2-D-Kinematik, der 2-D-Parallelkinematik sowie der 3-D-Delta-Kinematik sind auch 6-Achs-Kinematiken einfach realisierbar. Die Auswahl und Parametrierung der jeweiligen Kinematik erfolgt komfortabel im TwinCAT System Manager. Dort werden im Kinematikkanal – neben dem Typ (z. B. Delta oder SCARA) – auch die Stablängen und Versätze parametriert. Für eine Dynamikvorsteuerung können Massen und Massenträgheiten vorgegeben werden. Zusätzlich umfasst die Softwarebibliothek auch Tracking-Funktionalitäten. Dabei wird der Roboter auf ein bewegtes Objekt aufsynchronisiert, um z. B. Werkstücke von Förderbändern oder von schräg liegenden Drehtellern zu greifen.
Die nahtlose Integration der Roboterkinematiken in die Steuerung macht nicht nur eine zusätzliche Roboter-CPU überflüssig, sondern sorgt auch für eine optimale Interaktion und Synchronisation mit der SPS und den bestehenden Motion-Control-Funktionen: Direkte Schnittstellen ersetzen die aufwendige Kommunikation zwischen unterschiedlichen Steuerungen und Systemen. Daraus resultieren eine hohe Performance sowie eine verbesserte Genauigkeit.
In der Kunststofftechnik kann TwinCAT Kinematik Transformation bei 6-Achs-Robotern zur Anwendung kommen. Als branchenspezifische Erweiterung von TwinCAT unterstützten die TwinCAT Plastic Application Components die weit verbreiteten Euromap-Schnittstellen zwischen Spritzgießmaschine und Handling, entweder als Euromap 67 oder – zukünftig – als Euromap 79 (OPC 40079).
Beckhoff ist seit langen Jahren – als proprietäre Lösungen noch weit verbreitet waren – ein entschiedener Verfechter offener Standards. Hierzu gehört auch das große Engagement im Bereich der OPC-Standardisierung. Unsere Kunden profitieren daher von einer besonders umfangreichen Interoperabilität zwischen Beckhoff und Fremdprodukten.
Beckhoff ist eines der wenigen Unternehmen, das seine Produkte jährlich in den neuesten Versionen und mit den neuesten Funktionen auf reale Interoperabilität und Stabilität hin untersuchen lässt. Zurzeit werden in den unterschiedlichen Domänen des Maschinenbaus Companion Specifications definiert. In der Kunststofftechnik wird dies durch die Euromap Organisation vorangetrieben. Beckhoff arbeitet aktiv an den Companion Specifications für die Kunststoffindustrie mit und kann deshalb zeitnah neue Spezifikationen in seine Produkte integrieren. Innerhalb von TwinCAT ist eine OPC-UA-Schnittstelle optional verfügbar (TF6100), die den entsprechenden Companion Specifications der Euromap genügt.
Für die Maschine-zu-Maschine-Kommunikation wurde die Euromap 82 (OPC 40082) implementiert; für die Verbindung zu Leitrechnern oder in die Cloud steht die Euromap 77 (OPC 40077) zur Verfügung. Für die Kommunikation zwischen Spritzgießmaschine und Handling unterstützen die TwinCAT Plastic Application Components die Euromap-Norm 67 oder – zukünftig – die Euromap 79 (OPC 40079). Neben den OPC-UA-basierten Euromap-Schnittstellen empfiehlt Beckhoff bei zeitkritischen Prozessen, wie z. B. bei der Robotersynchronisation im Hochleistungsspritzguss, unbedingt den Einsatz von EtherCAT als deterministischem Feldbus.