
TF5065 | TwinCAT 3 Motion Control XFC

TF5065 | TwinCAT 3 Motion Control XFC

XFC 极速控制技术在 PC 上使用 EtherCAT、特殊 I/O 端子模块和 TwinCAT 实现超高速和高精度响应。通过 EtherCAT 分布式时钟(DC)和合适的端子模块、分布式锁存器或凸轮控制器也可以简单地使用这一方式实现。
- 用于高精度采集和切换与轴位置相关的数字量信号的功能块
- EtherCAT 分布式时钟加上基于时间戳的 EtherCAT EL1252、EL2252 或 EL2262 输入和输出端子模块
- 用于转换分布式时钟时间为位置以及转换位置为分布式时钟时间的功能块
- 方便的 TouchProbe 功能块,符合 PLCopen 标准
- 数字式凸轮控制器作为符合 PLCopen 标准的功能块
当与 TwinCAT NC I 结合使用时,将根据轨迹位置提供用于高精度切换信号的功能块。
产品状态:
正常供应
产品信息
| 技术数据 | TF5065 |
|---|---|
| 要求 | TC1250, TC1260 |
| 操作系统 | Windows 10, Windows CE, TwinCAT/BSD |
| CPU 结构 | x86, x64, Arm® |
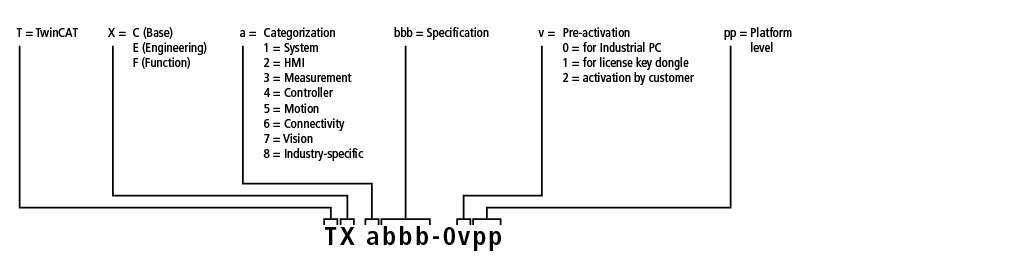
| 订购信息 | |
|---|---|
| TF5065-0v40 | TwinCAT 3 Motion Control XFC,平台等级 40(普通型) |
| TF5065-0v50 | TwinCAT 3 Motion Control XFC,平台等级 50(普通增强型) |
| TF5065-0v60 | TwinCAT 3 Motion Control XFC,平台等级 60(中等性能型) |
| TF5065-0v70 | TwinCAT 3 Motion Control XFC,平台等级 70(高性能型) |
| TF5065-0v80 | TwinCAT 3 Motion Control XFC,平台等级 80(极高性能型) |
| TF5065-0v81 | TwinCAT 3 Motion Control XFC,平台等级 81(极高性能型) |
| TF5065-0v82 | TwinCAT 3 Motion Control XFC,平台等级 82(极高性能型) |
| TF5065-0v83 | TwinCAT 3 Motion Control XFC,平台等级 83(极高性能型) |
| TF5065-0v84 | TwinCAT 3 Motion Control XFC,平台等级 84(极高性能型) |
| TF5065-0v90 | TwinCAT 3 Motion Control XFC,平台等级 90(其它) |
| TF5065-0v91 | TwinCAT 3 Motion Control XFC,平台等级 91(其它,5...8 个处理器核) |
| TF5065-0v92 | TwinCAT 3 Motion Control XFC,平台等级 92(其它,9...16 个处理器核) |
| TF5065-0v93 | TwinCAT 3 Motion Control XFC,平台等级 93(其它,17...32 个处理器核) |
| TF5065-0v94 | TwinCAT 3 Motion Control XFC,平台等级 94(其它,33...64 个处理器核) |
对于平台等级 90-94,我们推荐使用 TwinCAT 3 授权加密狗。
正在加载页面内容…请稍候
正在加载页面内容…请稍候
© Beckhoff Automation 2025 - 使用条款