EtherCAT | Distributed Clocks: Functional principle, application and diagnostics
Distributed Clocks are an essential element of EtherCAT communication enabling decentralised, end-to-end system synchronisation including CPU, I/O and drive technology components. In this 30-minute webinar, Martin Podrouschek and Fabian Assion, both Product Management I/O, will explain the functional principle of EtherCAT Distributed Clocks and the application with Beckhoff EtherCAT products. Moreover, the possibilities for parameter setting and diagnostics of Distributed Clocks in TwinCAT are outlined.
More about this video

TwinCAT
The TwinCAT software system turns almost any PC-based system into a real-time control with multiple PLC, NC, CNC and/or robotics runtime systems.

I/O
Use our I/O components to implement simple or complex applications with EtherCAT and other common fieldbus systems.
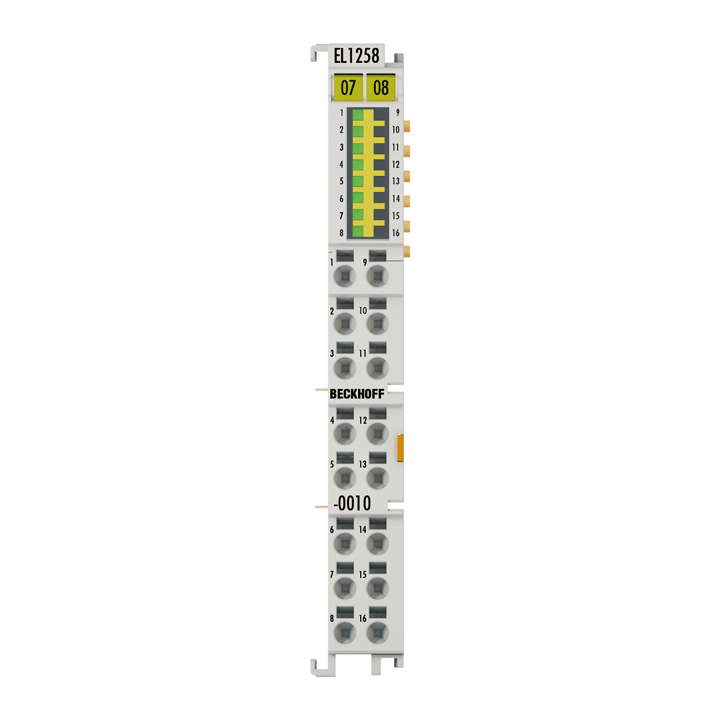
EL1258-0010 | EtherCAT Terminal, 8-channel digital input, 24 V DC, 1 µs, ground switching, multi-timestamp
The 8-channel digital input terminal EL1258-0010 acquires fast binary control signals from the process level and transmits them, in an electrically isolated form, to the controller. The EL1258-0010 is the ground switching version of the EL1258 and offers not only a higher channel density compared to the EL1252, but also higher performance due to the multi-timestamp function. Whereas the EL1252 can accept one edge change with timestamp per bus cycle, the EL1258-0010 offers the possibility to register up to 32 events with timestamps. The EL1258-0010 is synchronized with other EtherCAT devices through the distributed clocks system, so that events in the whole system can be measured with a uniform timebase.
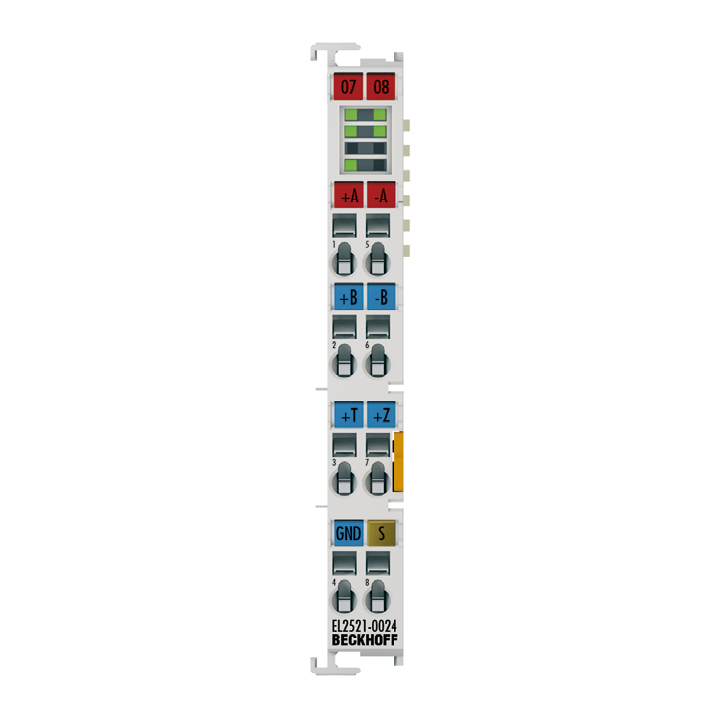
EL2521-0024 | EtherCAT Terminal, 1-channel pulse train output, incr. enc. simulation, 24 V DC, 1 A
The EL2521-xxxx output terminals change the frequency of a binary signal and output it (electrically isolated from the K-bus). The frequency is preset by a 16 bit value from the automation device. The signal state of the EtherCAT Terminal is indicated by light emitting diodes. The LEDs are clocked with the outputs and each displays an active output.
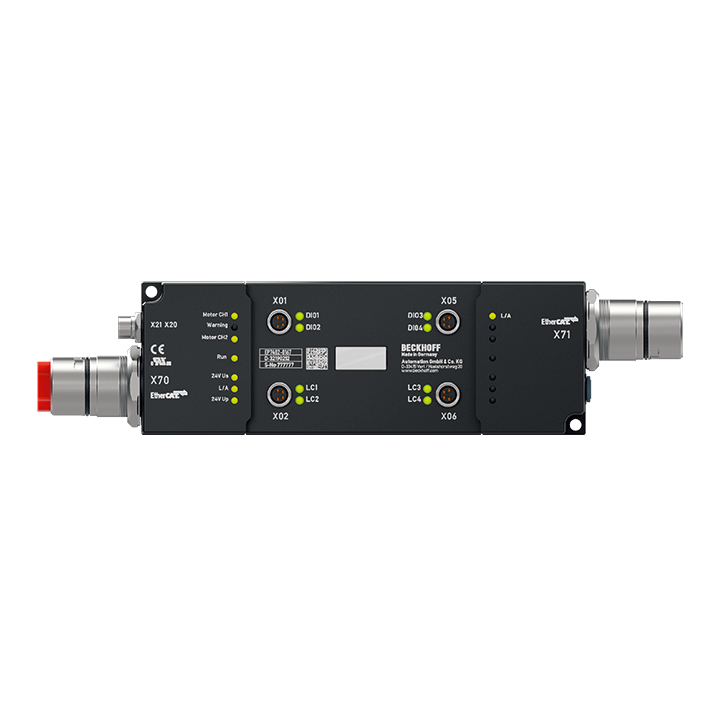
EP7402-0167 | EtherCAT Box, 2-channel motion interface, BLDC motor, 48 V DC, 3.5 A, M8
The EP7402-0167 EtherCAT Box offers two outputs with integrated MDR controller for the direct connection of 48 V DC conveyor roller motors or other BLDC motors with max. 3.5 A. Eight additional digital inputs/outputs enable connection of e.g. photoelectric switches and communication between the box modules in operation without PLC.
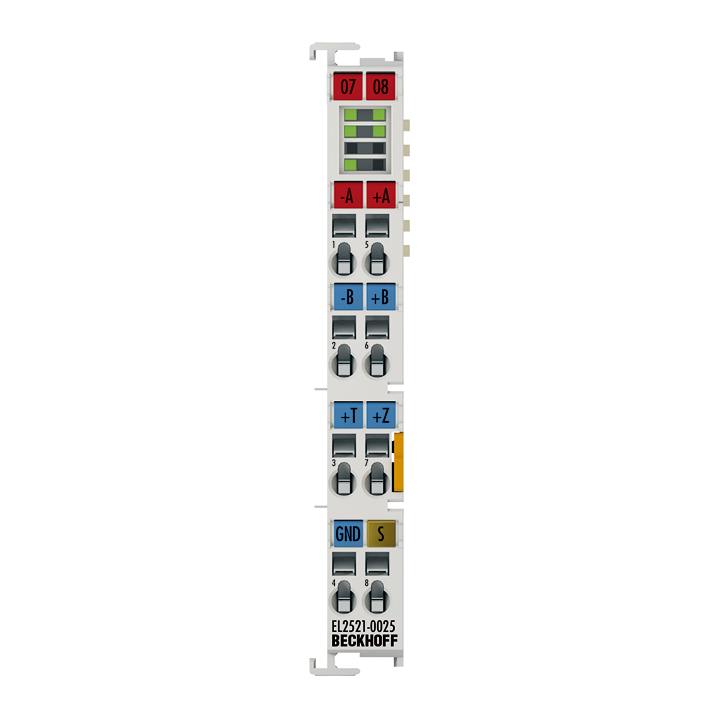
EL2521-0025 | EtherCAT Terminal, 1-channel pulse train output, incr. enc. simulation, 24 V DC, 1 A, ground switching
The EL2521-xxxx output terminals change the frequency of a binary signal and output it (electrically isolated from the K-bus). The frequency is preset by a 16 bit value from the automation device. The signal state of the EtherCAT Terminal is indicated by light emitting diodes. The LEDs are clocked with the outputs and each displays an active output.
EL2521-0124 | EtherCAT Terminal, 1-channel pulse train output, incr. enc. simulation, 24 V DC, 1 A, with capture/compare input/output
The EL2521-xxxx output terminals change the frequency of a binary signal and output it (electrically isolated from the E-bus). The frequency is preset by a 16 bit value from the automation device. The signal state of the EtherCAT Terminal is indicated by light emitting diodes. The LEDs are clocked with the outputs and each displays an active output.
EL3142-0010 | EtherCAT Terminal, 2-channel analog input, current, ±10 mA, 16 bit, single-ended
The job of the EL3142-0010 analog input terminal is to supply power to measuring transducers located in the field, and to transmit analog measurement signals with electrical isolation to the automation device. The voltage for the sensors is supplied to the terminals via the power contacts. The power contacts can optionally be supplied with operating voltage in the standard way or via a supply terminal (EL9xxx) with electrical isolation. The input electronics is independent of the supply voltage of the power contacts. The 0 V power contact is the reference potential for the inputs. The EtherCAT Terminal indicates its signal state by means of light emitting diodes.