EtherCAT | Distributed Clocks: Functional principle, application and diagnostics
Distributed Clocks are an essential element of EtherCAT communication enabling decentralised, end-to-end system synchronisation including CPU, I/O and drive technology components. In this 30-minute webinar, Martin Podrouschek and Fabian Assion, both Product Management I/O, will explain the functional principle of EtherCAT Distributed Clocks and the application with Beckhoff EtherCAT products. Moreover, the possibilities for parameter setting and diagnostics of Distributed Clocks in TwinCAT are outlined.
More about this video

TwinCAT
The TwinCAT software system turns almost any PC-based system into a real-time control with multiple PLC, NC, CNC and/or robotics runtime systems.

I/O
Beckhoff liefert ein umfangreiches Programm an Feldbuskomponenten für alle gängigen I/Os und Feldbussysteme.
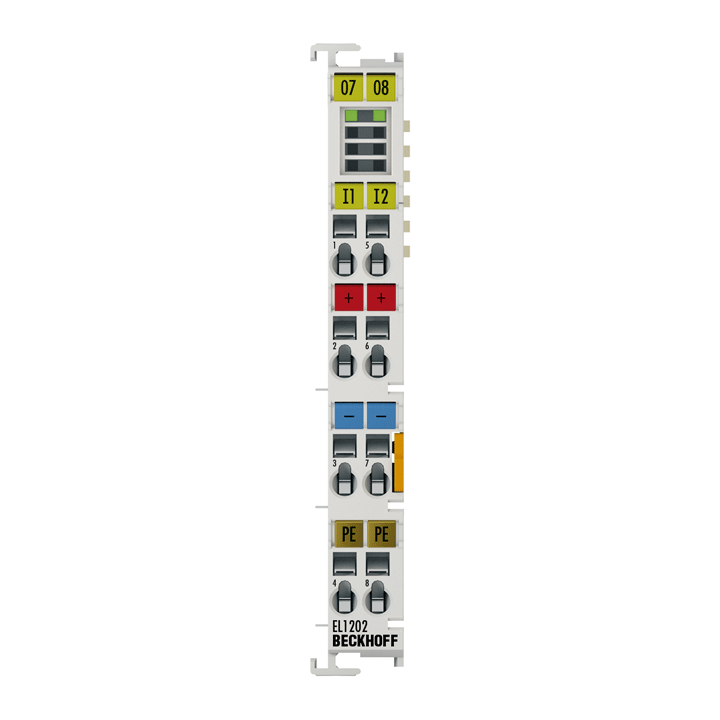
EL1202 | EtherCAT Terminal, 2-channel digital input, 24 V DC, 1 µs
The EL1202 digital input terminal acquires the binary 24 V control signals from the process level and transmits them, in an electrically isolated form, to the higher-level automation unit. The EtherCAT Terminal contains two channels whose signal state is indicated by LEDs.
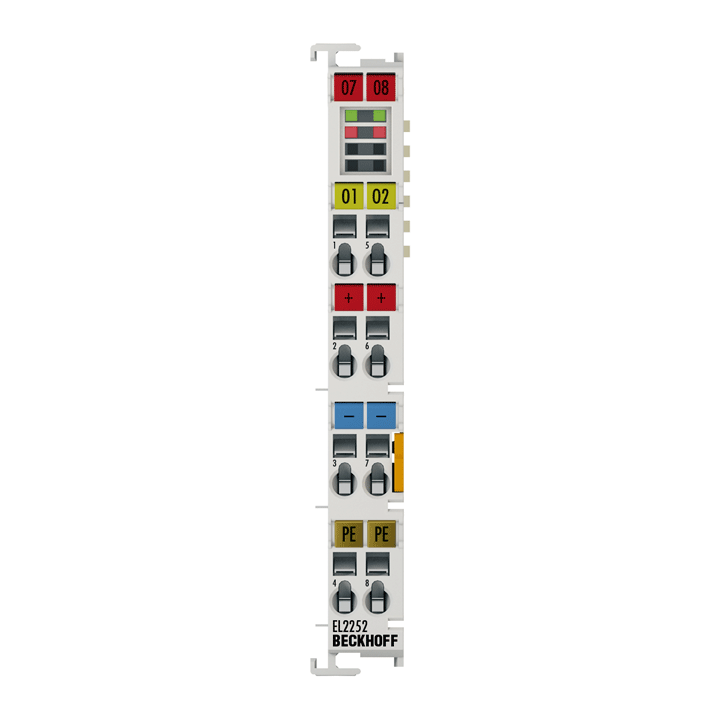
EL2252 | EtherCAT Terminal, 2-channel digital output, 24 V DC, 0.5 A, timestamp
The EL2252 digital output terminal connects the binary control output signals at the process level with electrical isolation. The outputs of the EtherCAT Terminal are switched with high precision to match the transferred timestamp, which has a resolution of 10 ns. This technology enables output switching times to be specified precisely across the system. The distributed clocks are used for reference. In conjunction with the EL1252 (digital input terminal with time stamp), the EL2252 enables responses with equidistant time intervals, largely independent of the bus cycle time. Each output can be switched to high resistance individually.
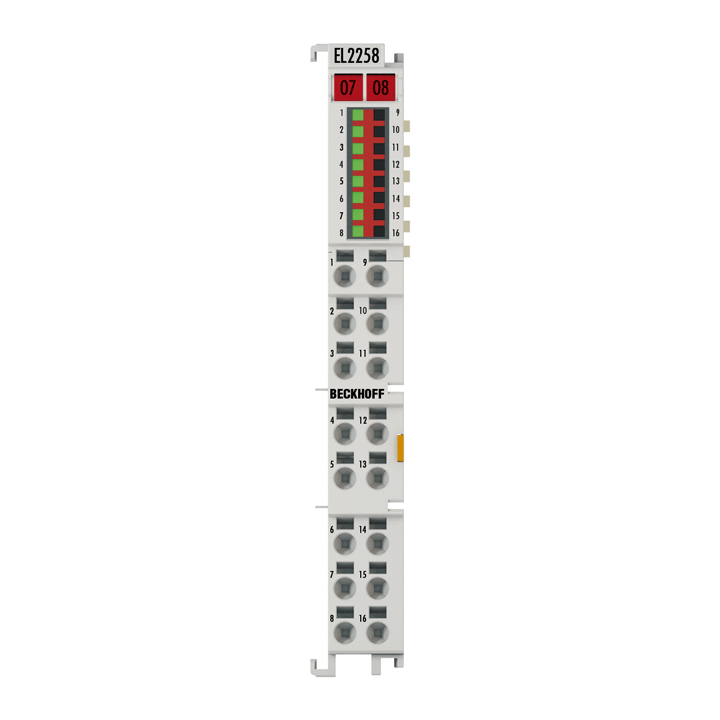
EL2258 | EtherCAT Terminal, 8-channel digital output, 24 V DC, 0.5 A, multi-timestamp
The 8-channel digital output terminal EL2258 connects the binary output signals of the controller at the process level with electrical isolation. As in the EL2252, the outputs of the EL2258 are switched with high precision relative to the transferred time stamp, although there are certain differences in the details: Eight instead of two channels, lower timestamp resolution and auto-activation, which enables consecutive switching tasks in each cycle. The multi-timestamping feature allows each EtherCAT cycle to capture or output as many events per channel as were preloaded in the internal buffer.
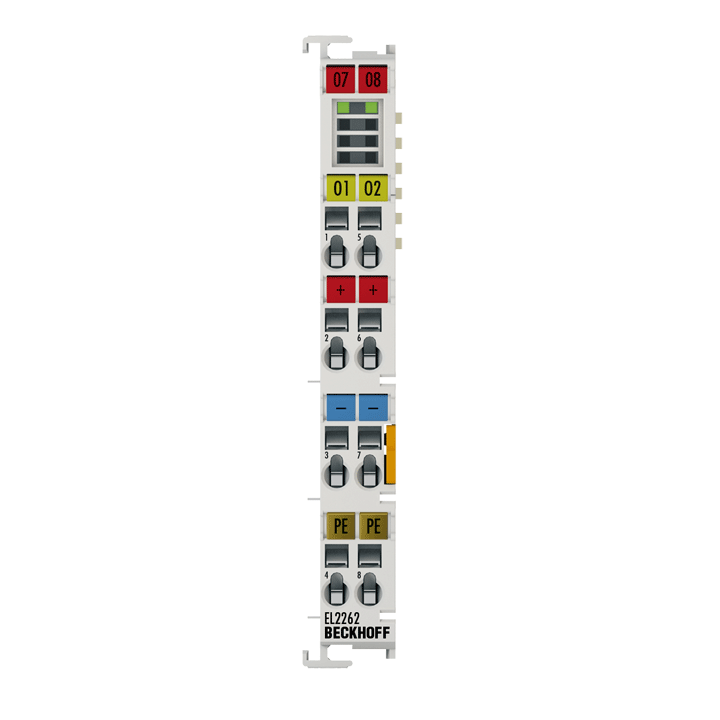
EL2262 | EtherCAT Terminal, 2-channel digital output, 24 V DC, 0.5 A, oversampling
The EL2262 digital output terminal connects the binary control output signals at the process level with electrical isolation. The outputs are controlled with an adjustable integral multiple (oversampling factor: n) of the bus cycle frequency (n microcycles per bus cycle). For each bus cycle, the EtherCAT Terminal receives a process data block that is output consecutively. The timebase of the terminal can be synchronized precisely with other EtherCAT devices via distributed clocks. An output pattern with a significantly higher pulse sequence than the bus cycle time is thus output precisely with the system-wide timebase. This procedure enables the temporal resolution of the digital output signals to be increased to n times the bus cycle time. The maximum output rate is 1 Msamples/s.
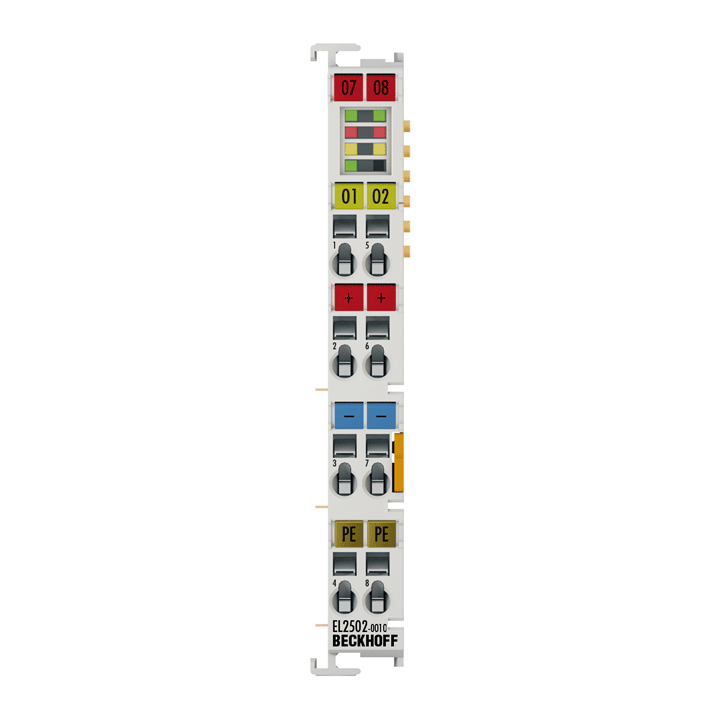
EL2502-0010 | EtherCAT Terminal, 2-channel PWM output, 24 V DC, 0.5 A, timestamping
The EL2502-0010 output terminal modulates the pulse width of a binary signal, and outputs it electrically isolated from the E-bus. The mark/space ratio is preset by a 16-bit value from the automation device. The output stage is protected against overload and short-circuit. The EtherCAT Terminal contains two channels whose signal state is indicated by LEDs. The LEDs are driven in time with the outputs, and show the duty factor by their brightness. The EL2502-0010 supports EtherCAT distributed clock timestamps in order to influence switching on, off and over of a PWM signal with microsecond precision.

EL2521 | EtherCAT Terminal, 1-channel pulse train output, incr. enc. simulation, RS422, 50 mA
The EL2521-xxxx output terminals change the frequency of a binary signal and output it (electrically isolated from the E-bus). The frequency is preset by a 16 bit value from the automation device. The signal state of the EtherCAT Terminal is indicated by light emitting diodes. The LEDs are clocked with the outputs and each displays an active output.
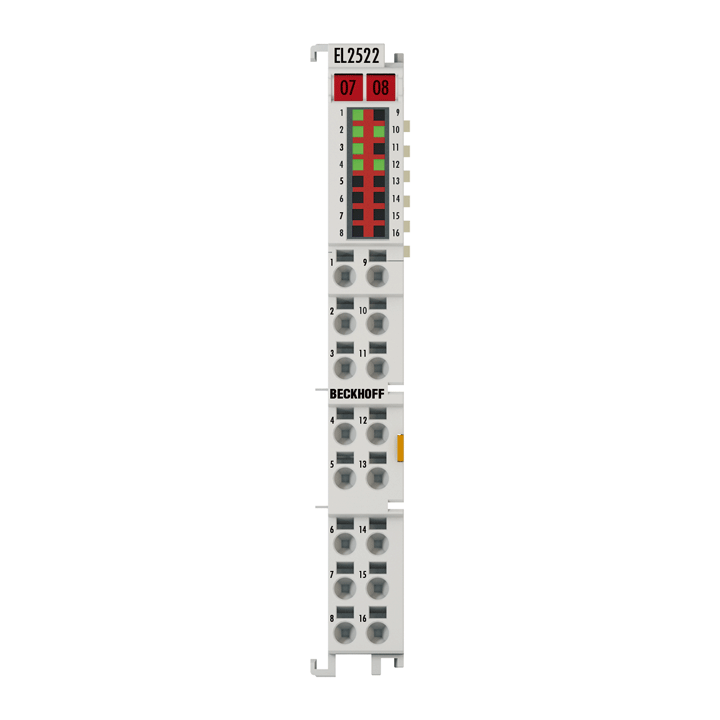
EL2522 | EtherCAT Terminal, 2-channel pulse train output, incr. enc. simulation, RS422, 50 mA
The EL2522 incremental encoder simulation terminal (pulse train) outputs a frequency-modulable signal on two channels with four outputs. The signal can be used to control motor drivers or other signal receivers, which are controlled by single cycles. The pulse sequence and pulse number can be specified directly via the process data in the frequency. Alternatively, the integrated path control can be used. For each channel the operating mode (frequency modulation, pulse/direction specification and incremental encoder simulation) can be selected. In addition, the EtherCAT Terminal can control three output channels in the ABC encoder simulation.
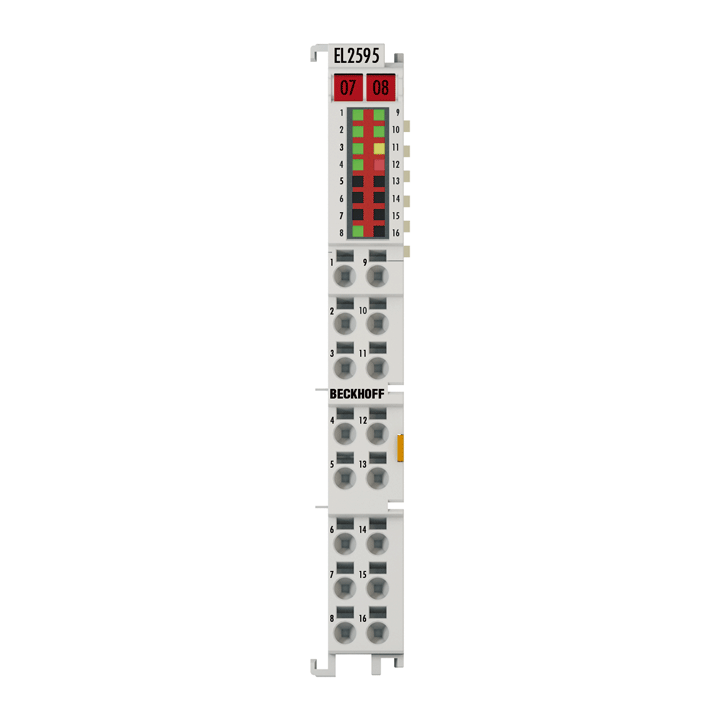
EL2595 | EtherCAT Terminal, 1-channel LED output, 2…48 V DC, 0.7 A
The EL2595 EtherCAT Terminal contains a constant current source for LEDs and is designed to control one or more LEDs connected in series. The user specifies the required set current, the integrated power supply unit then provides the required forward voltage, depending on the connected LEDs. For this purpose, the EL2595 has a step-up/step-down power supply unit, which generates the output voltage from the 24 V DC input voltage. The output voltage is also adjusted during operation in order to maintain the set current. The current can be switched quickly for short-term lighting, hence even extremely short flashes of light are possible. The pulse duration is adjustable from 1 µs to infinity, the flash time itself can be set through a timestamp via distributed clocks; an external trigger input is also available. Extensive real-time diagnostics, e.g. for input current/voltage and output current/voltage allow detailed monitoring of the LED light intensity. If a specifiable load corridor is exited, e.g., due to load errors, the EL2595 switches off to protect the load (resettable).
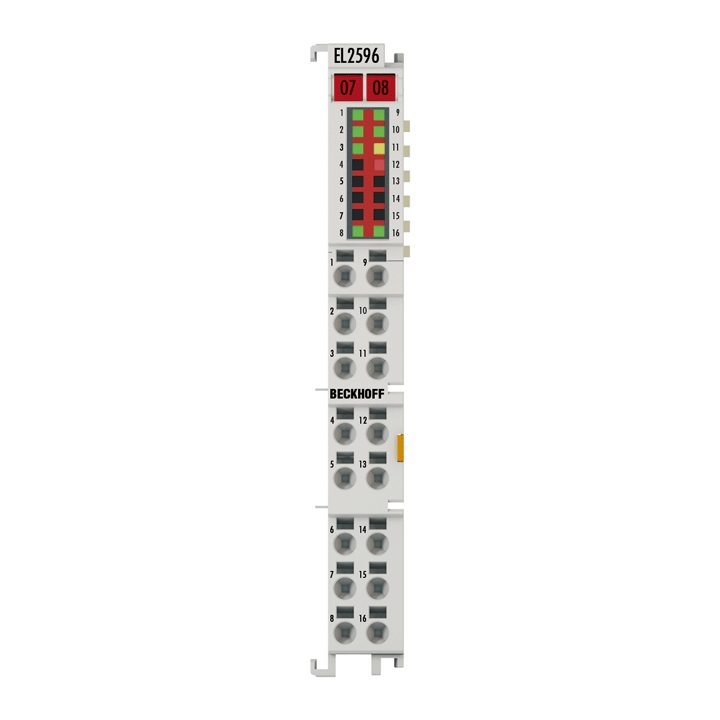
EL2596 | EtherCAT Terminal, 1-channel LED output, 0…24 V DC, 3 A
The EL2596 LED strobe control terminal contains a flexible power supply unit that supplies the LED with the required current and voltage. Applications from continuous light to short light pulses in the kHz range are thus possible. Each individual flash can be triggered in a controlled manner by the control system via the distributed clocks/timestamp function. The EL2596 has a trigger output for triggering cameras and high-quality, fast current and voltage control, so that line scan cameras, for example, also benefit from constant illumination. Extensive real-time diagnostics, e.g. for input current/voltage and output current/voltage allow detailed monitoring of the LED light intensity. Thus, overdrive applications with short high-current pulses through the LED are possible. If a specifiable load corridor is exited, e.g., due to load errors, the EL2596 switches off to protect the LED (resettable).
EL2596-0010 | EtherCAT Terminal, 1-channel LED output, 0…48 V DC, 3 A
The EL2596-0010 LED strobe control terminal contains a flexible power supply unit that supplies the LED with the required current and voltage. Applications from continuous light to short light pulses in the kHz range are thus possible. Each individual flash can be triggered in a controlled manner by the control system via the distributed clocks/timestamp function. The EL2596-0010 has a trigger output for triggering cameras and high-quality, fast current and voltage control, so that line scan cameras, for example, also benefit from constant illumination. Extensive real-time diagnostics, e.g. for input current/voltage and output current/voltage allow detailed monitoring of the LED light intensity. Thus, overdrive applications with short high-current pulses through the LED are possible. If a specifiable load corridor is exited, e.g., due to load errors, the EL2596-0010 switches off to protect the LED (resettable).
EL3356-0010 | EtherCAT Terminal, 1-channel analog input, measuring bridge, full bridge, 24 bit, high-precision
The analog EL3356-0010 input terminal enables direct connection of a resistor bridge or load cell in a 4- or 6-wire connection technology. The ratio between the bridge voltage UD and the supply voltage UREF is determined simultaneously in the input circuit and the final load value is calculated as a process value on the basis of the settings in the terminal. With automatic self-calibration (can be deactivated), dynamic filters and distributed clock support, the terminal with measuring cycles of 100 µs can be used for fast and precise monitoring of torque or vibration sensors.
EL3356-0090 | EtherCAT Terminal, 1-channel analog input, measuring bridge, full bridge, 24 bit, high-precision, TwinSAFE SC
The analog EL3356-0090 input terminal enables direct connection of a resistor bridge or load cell in a 4- or 6-wire connection technology. The ratio between the bridge voltage UD and the supply voltage UREF is determined simultaneously in the input circuit and the final load value is calculated as a process value on the basis of the settings in the terminal. With automatic self-calibration (can be deactivated) and dynamic filters the terminal with measuring cycles of 10 ms can be used for slow weighings with high precision.
EL3443 | EtherCAT Terminal, 3-channel analog input, power measurement, 480 V AC/DC, 1 A, 24 bit
The EL3443 EtherCAT Terminal enables the measurement of all relevant electrical data of the supply network and carries out simple pre-evaluation. The voltage is measured via direct connection of L1, L2, L3 and N. The current of the three phases L1, L2 and L3 is fed via simple current transformers. All measured currents and voltages are available as root-mean-square values. In the EL3443 terminal, the effective power and energy consumption for each phase are calculated. The RMS values of voltage U and current I as well as the active power P, apparent power S, reactive power Q, frequency f, phase shift angle cos φ and harmonic are available. The EL3443 offers extended functionality for mains analysis and energy management.

EL3446 | EtherCAT Terminal, 6-channel analog input, current, 1 A, 24 bit, distributed power measurement
The EL3446 EtherCAT Terminal enables the measurement of all relevant electrical data of the supply network and carries out simple pre-evaluation. Since the EL3446 itself has no voltage inputs, the voltage measured values are transmitted via EtherCAT by an EL3443 to be installed once per network. The current of up to six phases is fed via simple current transformers. All measured currents and voltages are available as root-mean-square values. In the EL3446 terminal, the effective power and energy consumption for each phase are calculated. The RMS values of voltage U and current I as well as the active power P, apparent power S, reactive power Q, frequency f, phase shift angle cos φ and harmonic are available. The EL3446 offers extended functionality for mains analysis and energy management.
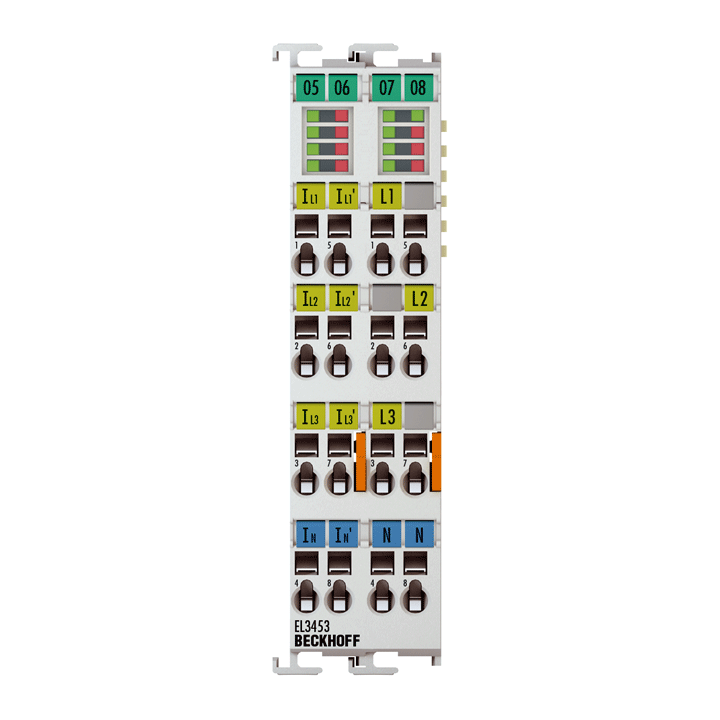
EL3453 | EtherCAT Terminal, 3-channel analog input, power measurement, 690 V AC, 0.1/1/5 A, 24 bit, electrically isolated
The EL3453 EtherCAT power measurement terminal has voltage inputs for direct monitoring of high-capacity generators up to max. 690 V AC, as is common in the wind industry, for example. No upstream voltage transformer is required. The four current inputs are electrically isolated so that the terminal can be used in all common grounded current transformer configurations such as 2- or 3-transformer configurations with star or delta connection incl. neutral conductor current measurement. The EL3453 can be used for simple grid analysis up to the 63rd harmonics analysis. Alternatively, all readings can be combined in a power quality factor for simplified diagnostics. Like all measured terminal data, the harmonic content can be read via the process data. The EL3453 offers the “ExtendedRange” feature enabling the use of the full technical measuring range, which equals 130% of the specified nominal measuring range.
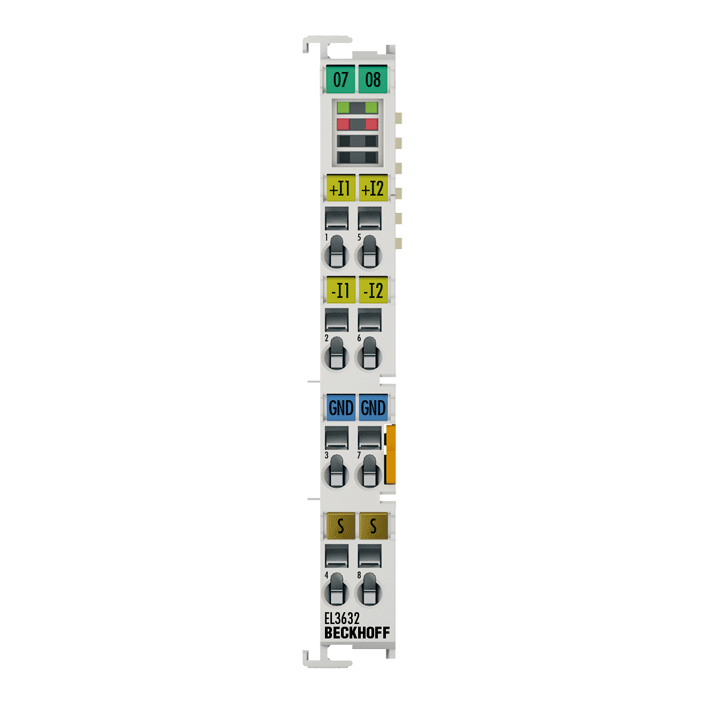
EL3632 | EtherCAT Terminal, 2-channel analog input, IEPE/accelerometer, 16 bit, 50 ksps
Accelerometers with IEPE interface can be directly connected to the EL3632 EtherCAT Terminal. The measuring signals are analyzed on the PC via the TwinCAT library. This enables all benefits of the PC platform, such as performance and flexibility, to be fully utilized. Alternatively, custom software can be used for the analysis. The terminal can be adapted to individual requirements through configurable filters and supply currents.
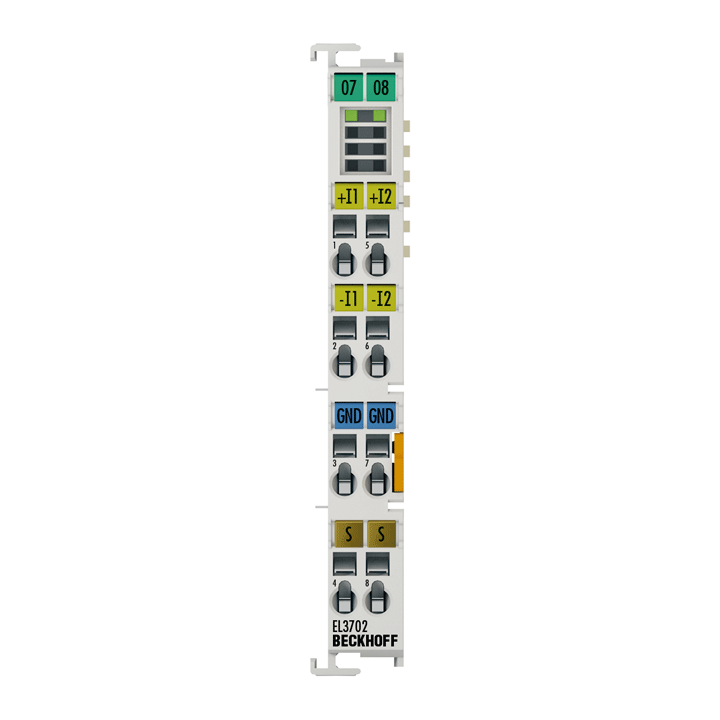
EL3702 | EtherCAT Terminal, 2-channel analog input, voltage, ±10 V, 16 bit, oversampling
The EL3702 analog input terminal handles signals in the range between -10 and +10 V. The voltage is digitized to a resolution of 16 bits, and is transmitted, electrically isolated, to the controller. The signals are oversampled with an adjustable, integer multiple (oversampling factor: n) of the bus cycle frequency (n microcycles per bus cycle). For each bus cycle, the EtherCAT Terminal generates a process data block that is transferred collectively during the next bus cycle. The time base of the terminal can be synchronized precisely with other EtherCAT devices via distributed clocks. This procedure enables the temporal resolution of the analog input signals to be increased to n times the bus cycle time. In conjunction with the EL47xx (analog output terminal with oversampling), responses with equidistant time intervals, e.g. in the event of a threshold value being exceeded, become possible.
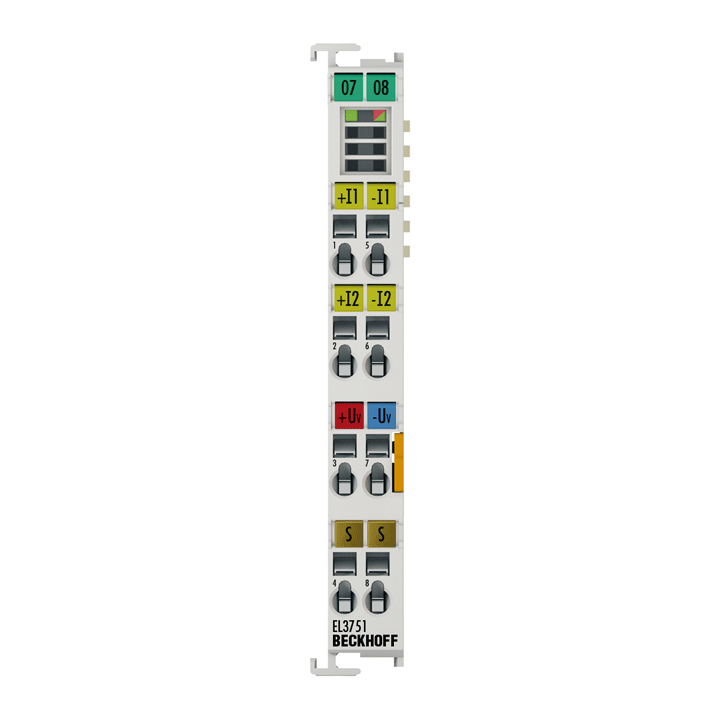
EL3751 | EtherCAT Terminal, 1-channel analog input, multi-function, 24 bit, 10 ksps
The EL3751 analog input terminal is part of the new generation of analog EtherCAT measurement terminals. The nominal measuring range of the input channel can be comprehensively parameterized, both electrically and on the software side:
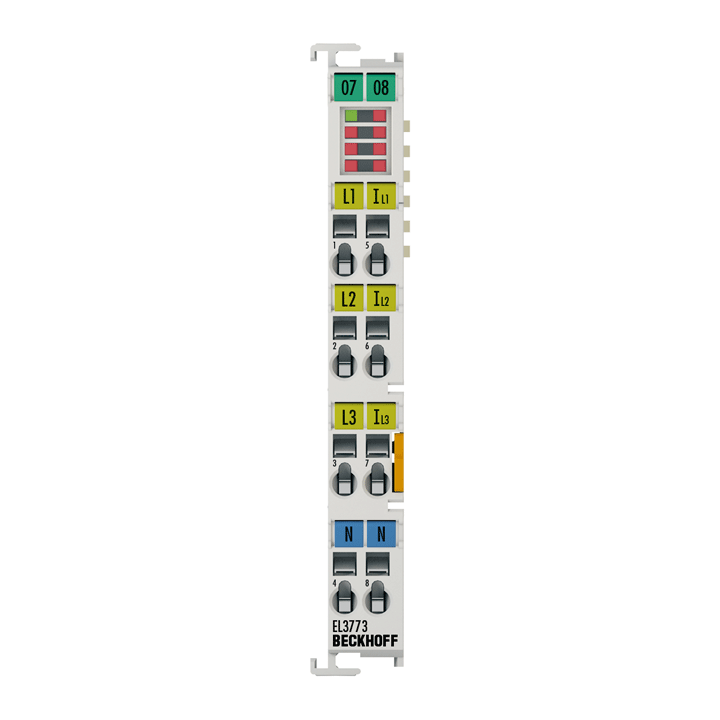
EL3773 | EtherCAT Terminal, 3-channel analog input, multi-function, 500 V AC/DC, 1 A, 16 bit, 10 ksps, oversampling
The EL3773 and EL3783 power monitoring terminals are designed for state monitoring of 3-phase AC voltage systems. For each phase voltages and currents are sampled as instantaneous values with a resolution of 16 bits:
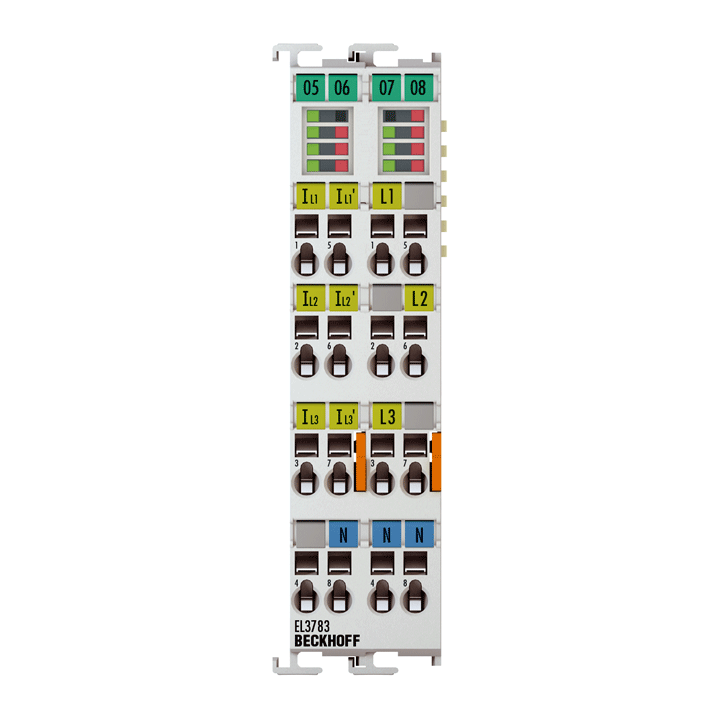
EL3783 | EtherCAT Terminal, 3-channel analog input, multi-function, 690 V AC, 1/5 A, 16 bit, 20 ksps, electrically isolated, oversampling
The EL3783 EtherCAT Terminal is a power monitoring I/O terminal used for state monitoring of a 3-phase AC voltage system. For each phase, voltage up to 400/690 Vrms and current up to 1 Arms/5 Arms are sampled as instantaneous values with a resolution of 16 bits. The six channels are measured simultaneously based on the EtherCAT oversampling principle with a temporal resolution of up to 50 µs and then passed on to the control system. With the processing power available there and in combination with the TwinCAT Function TF3650, true RMS or power calculations as well as complex user-specific algorithms can be calculated via the voltage and current characteristics. Through the oversampling principle, the terminal is able to measure at significantly shorter intervals than the cycle time of the control system. AC and DC parameters must be connected and measured with a common reference potential.
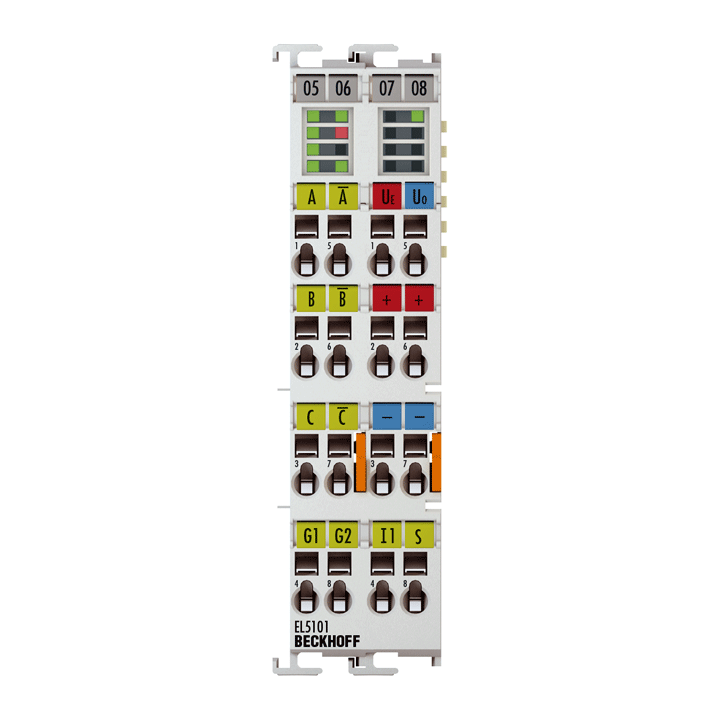
EL5101 | EtherCAT Terminal, 1-channel encoder interface, incremental, 5 V DC (DIFF RS422, TTL), 1 MHz
The EL5101 EtherCAT Terminal is an interface for the direct connection of incremental encoders with differential signals (RS422) or TTL single ended signals. Input frequencies up to 1 MHz can be evaluated. Two additional 24 V digital inputs are available for storing, blocking and setting the counter status. The error message output of an encoder can be connected and evaluated via the status input. The 5 V and 24 V supply of the encoder can be provided directly via the terminal connection points.
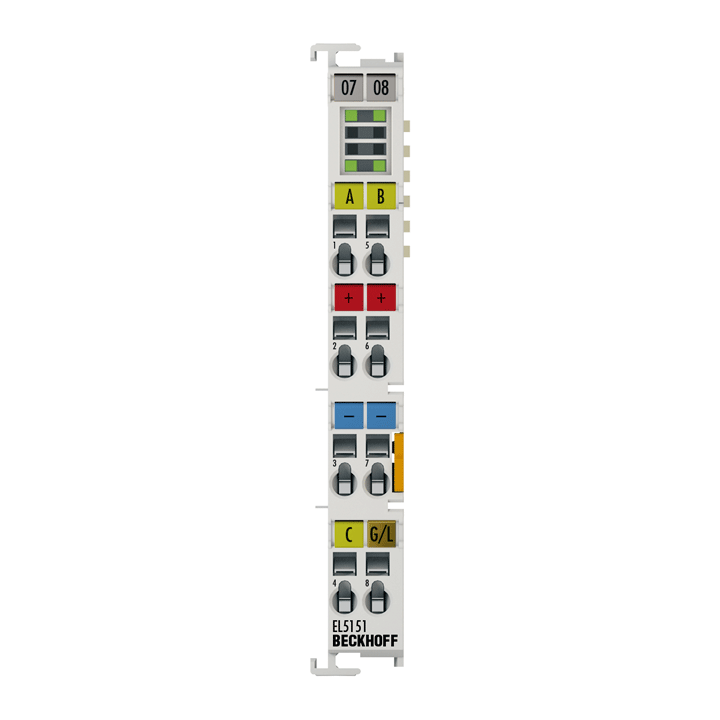
EL5151 | EtherCAT Terminal, 1-channel encoder interface, incremental, 24 V DC HTL, 100 kHz
The EL5151 EtherCAT Terminal is an interface for the direct connection of one incremental encoder (24 V HTL). An additional 24 V digital input is available for storing or blocking the counter status. As an alternative, the EL5151 can be used as a up/down counter. The 24 V supply of the encoder can be provided directly via the terminal connection points.
EL5152 | EtherCAT Terminal, 2-channel encoder interface, incremental, 24 V DC HTL, 100 kHz
The EL5152 EtherCAT Terminal is an interface for the direct connection of two incremental encoders (24-V-HTL) with A and B track. As an alternative, the EL5152 can be used as a up/down counter. The 24 V supply of the encoder can be provided directly via the terminal connection points.

EP3356-0022 | EtherCAT Box, 1-channel analog input, measuring bridge, full bridge, 24 bit, M12
The EP3356-0022 EtherCAT Box enables direct connection of a resistor bridge or load cell in a 4-wire connection technology. The ratio between the bridge voltage UD and the supply voltage UREF is determined simultaneously in the input circuit and the final load value is calculated as a process value on the basis of the settings in the EP3356-0022. With automatic self-calibration (can be deactivated), dynamic filters and distributed clock support, the EP3356-0022 with measuring cycles of 100 µs can be used for fast and precise monitoring of torque or vibration sensors.

EP3632-0001 | EtherCAT Box, 2-channel analog input, IEPE/accelerometer, 16 bit, 50 ksps, M8
The EP3632-0001 EtherCAT Box is a 2-channel oversampling interface for up to two IEPE sensors with 2-wire connection. The current of the integrated constant current source can be set to 2, 4 or 8 mA separately for each channel depending on the sensor and cable length. The input signal is sampled according to the oversampling principle with up to 50 ksamples per second per channel. The measured values can be correlated to other parts of the system through distributed clocks. Except for filtering, the EP3632-0001 does not pre-process the vibration amplitude values. This is done by the retrieving controller. The interface can be adapted to application-specific requirements by means of adjustable filters and supply currents. The TwinCAT 3 Condition Monitoring library offers extensive algorithms for signal evaluation by the controller, enabling full utilization of the performance and flexibility benefits of the PC platform.
EL1252 | EtherCAT Terminal, 2-channel digital input, 24 V DC, 1 µs, timestamp
The EL1252 digital input terminal acquires the fast binary 24 V control signals from the process level and transmits them, in an electrically isolated form, to the controller. The EtherCAT Terminal contains two channels whose signal state is indicated by LEDs. The signals are furnished with a time stamp that identifies the time of the last edge change with a resolution of 1 ns. With this XFC technology, signal characteristics can be traced exactly in time and correlated with the distributed clocks system-wide. With this technology, machine-wide parallel hardware wiring of digital inputs or encoder signals for synchronization purposes is often no longer required. In conjunction with the EL2252 EtherCAT Terminal (digital output terminal with time stamp), the EL1252 enables responses with equidistant time intervals, largely independent of the bus cycle time.
EL1252-0050 | EtherCAT Terminal, 2-channel digital input, 5 V DC, 1 µs, timestamp
The EL1252-0050 digital input terminal acquires the fast binary 5 V control signals from the process level and transmits them, in an electrically isolated form, to the controller. The EtherCAT Terminal has two channels that indicate their signal state via light emitting diodes. The signals are furnished with a time stamp that identifies the time of the last edge change with a resolution of 1 ns. With this XFC technology, signal characteristics can be traced exactly in time and correlated with the distributed clocks system-wide. With this technology, machine-wide parallel hardware wiring of digital inputs or encoder signals for synchronization purposes is often no longer required. The switching thresholds of the input circuit are based on the CMOS level: Signal voltage "0" < 0.8 V, signal voltage "1" > 2.4 V. The 5 V supply voltage can be generated by the EL9505 power supply terminal and fed into the power contacts.
EL1254 | EtherCAT Terminal, 4-channel digital input, 24 V DC, 1 µs, timestamp
The EL1254 digital input terminal acquires the fast binary 24 V control signals from the process level and transmits them, in an electrically isolated form, to the controller. The EtherCAT Terminal has four channels that indicate their signal state via light emitting diodes. The signals are furnished with a time stamp that identifies the time of the last edge change with a resolution of 1 ns. With this XFC technology, signal characteristics can be traced exactly in time and correlated with the distributed clocks system-wide. With this technology, machine-wide parallel hardware wiring of digital inputs or encoder signals for synchronization purposes is often no longer required.
EL1258 | EtherCAT Terminal, 8-channel digital input, 24 V DC, 1 µs, multi-timestamp
The EL1258 digital input terminal acquires the fast binary 24 V control signals from the process level and transmits them, in an electrically isolated form, to the controller. Each EtherCAT Terminal has eight channels that indicate their signal state via light emitting diodes. In comparison with the EL1252, the EL1258 offers not only a higher channel density, but also a higher performance thanks to the XFC multi-timestamp function. Whereas the EL1252 can accept one edge change with time stamp per bus cycle, the EL1258 offers the possibility to register up to 32 events with time stamps. The EL1258 is synchronized with other EtherCAT devices through the distributed clocks system, so that events in the whole system can be measured with a uniform timebase.
EL1259 | EtherCAT Terminal, 8-channel digital input + 8-channel digital output, 24 V DC, 1 µs, 0.5 A, multi-timestamp
The 16-channel EL1259 digital EtherCAT Terminal combines the functions of the EL1258 – eight multi-timestamp inputs – with those of the EL2258 – eight multi-timestamp outputs. The high channel density in conjunction with time stamping of the signals enables fast, efficient processes through optimized sensor and actuator control. The EL1259 is also synchronized with other devices through the distributed clocks system, so that events in the whole system can be measured with a uniform timebase. The combination of DC-switched inputs and outputs within one terminal can be used for local switching tasks.
EL1262 | EtherCAT Terminal, 2-channel digital input, 24 V DC, 1 µs, oversampling
The EL1262 digital input terminal acquires the fast binary 24 V control signals from the process level and transmits them, in an electrically isolated form, to the controller. The EtherCAT Terminal has two channels that indicate their signal state via light emitting diodes. The signals are sampled with a configurable, integer multiple (oversampling factor: n) of the bus cycle frequency (n microcycles per bus cycle). For each bus cycle, the EtherCAT Terminal generates a process data block that is transferred collectively during the next bus cycle. The timebase of the terminal can be synchronized precisely with other EtherCAT devices via distributed clocks. This XFC procedure enables the temporal resolution of the digital input signals to be increased to n times the bus cycle time.
EL1262-0050 | EtherCAT Terminal, 2-channel digital input, 5 V DC, 1 µs, oversampling
The EL1262-0050 digital input terminal acquires the fast binary 5 V control signals from the process level and transmits them, in an electrically isolated form, to the controller. The EtherCAT Terminal has two channels that indicate their signal state via light emitting diodes. The signals are sampled with a configurable, integer multiple (oversampling factor: n) of the bus cycle frequency (n microcycles per bus cycle). For each bus cycle, the EtherCAT Terminal generates a process data block that is transferred collectively during the next bus cycle. The timebase of the terminal can be synchronized precisely with other EtherCAT devices via distributed clocks. This XFC procedure enables the temporal resolution of the digital input signals to be increased to n times the bus cycle time. The switching thresholds of the input circuit are based on the CMOS level: Signal voltage "0" < 0.8 V, signal voltage "1" > 2.4 V. The 5 V supply voltage can be generated by the EL9505 power supply terminal and fed into the power contacts.
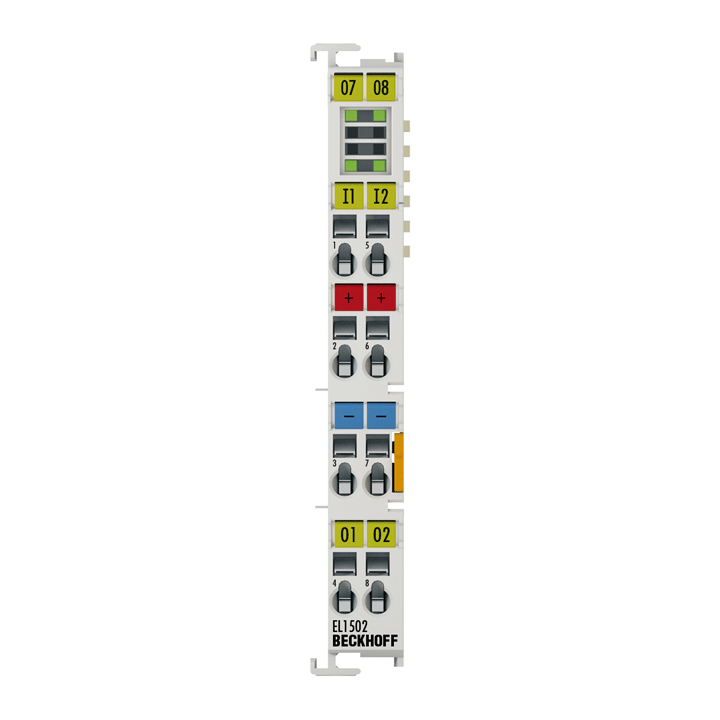
EL1502 | EtherCAT Terminal, 2-channel digital input, counter, 24 V DC, 100 kHz
The EL1502 EtherCAT Terminal is an up/down counter and transmits the counter value in an electrically isolated form to the higher-level automation device. When used as a single-channel up/down counter (32-bit), the pulse is set via the clock input; the counting direction is specified via the U/D input. Furthermore, the input can also be used as a gate input for triggering the counter. In 2-counter mode, two separate counters are available (Clock and Clock1 inputs), which can be parameterized as up or down counters. The signal state of the inputs and outputs is indicated by light emitting diodes. Both outputs are switched according to the counter state, so that they can be used as fast control signals for field devices. The EL1502 device supports the distributed clocks function. This means the counter can be read at constant intervals (DC accuracy << 1 µs).
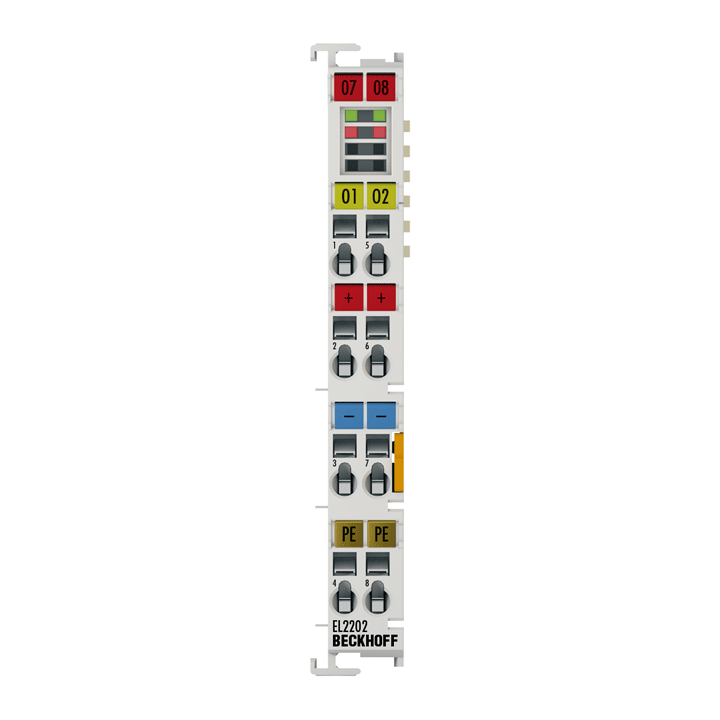
EL2202 | EtherCAT Terminal, 2-channel digital output, 24 V DC, 0.5 A, push-pull, tristate
The EL2202/EL2202-0100 digital output terminal connects the binary control signals from the automation device on to the actuators at the process level with electrical isolation. This terminal benefits from very small output delay and is therefore suitable for signals requiring particularly fast output. The EtherCAT Terminal has a push-pull output that can be actively switched to 24 V, 0 V or high-impedance. The EL2202-0100 contains two channels. LEDs indicate the signal state of each channel.
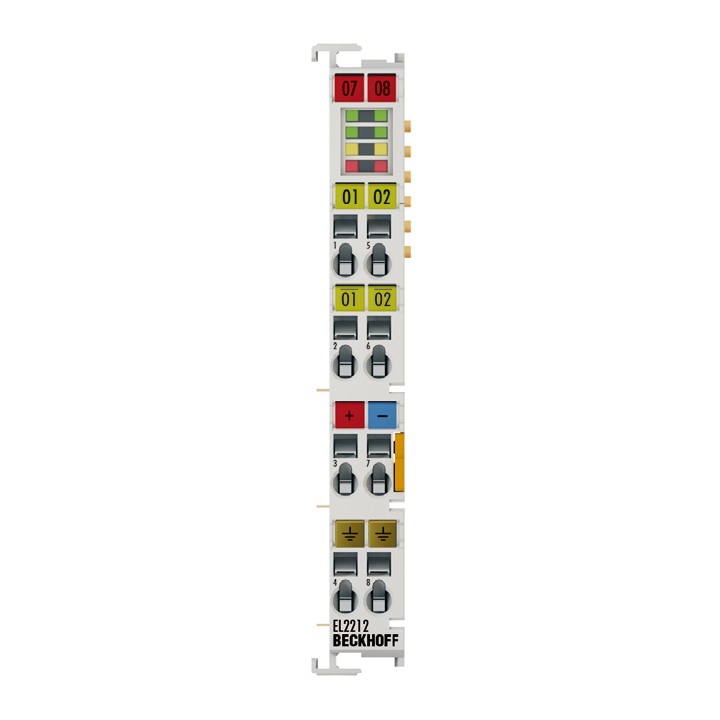
EL2212 | EtherCAT Terminal, 2-channel digital output, 24…72 V DC, 10 A, overexcitation, multi-timestamp
The EL2212 digital output terminal connects the binary control signals from the automation device on to the actuators at the process level with electrical isolation. The multi-timestamp features allow each EtherCAT cycle to capture as many events per channel as were preloaded in the internal buffer.
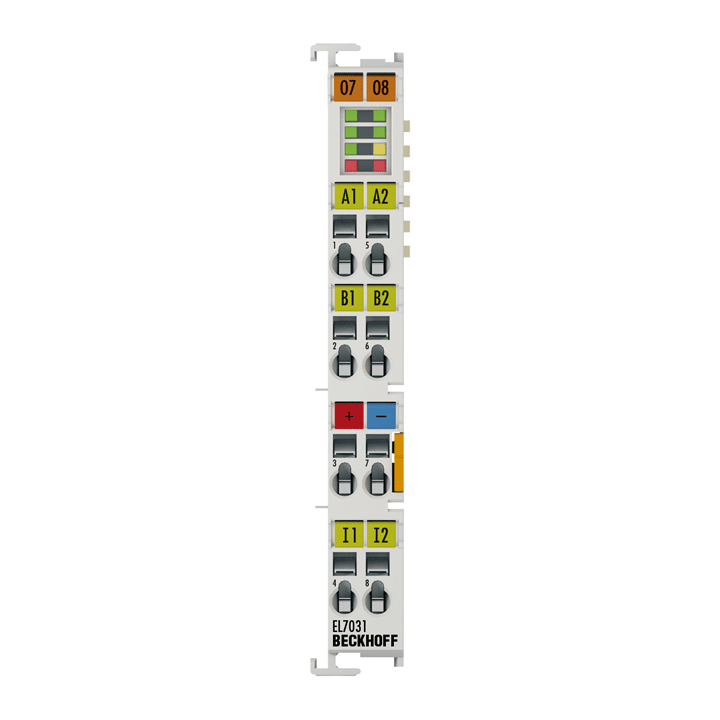
EL7031 | EtherCAT Terminal, 1-channel motion interface, stepper motor, 24 V DC, 1.5 A
The EL7031 EtherCAT Terminal is intended for the direct connection of stepper Motors in the low power range up to 1.5 A. The compact stepper motor output stage is accommodated in the EtherCAT Terminal together with two digital inputs for limit switches. Through parameterization, the EL7031 can be adjusted to the motor and the application requirements. 64-fold micro-stepping ensures particularly quiet and precise motor operation.
EL7031-0030 | EtherCAT Terminal, 1-channel motion interface, stepper motor, 24 V DC, 2.8 A
The EL7031-0030 EtherCAT Terminal is intended for the direct connection of stepper Motors in the low power range up to 2.8 A. The compact stepper motor output stage is accommodated in the EtherCAT Terminal together with two analog inputs (0…10 V/12 bit). Through parameterization, the EL7031-0030 can be adjusted to the motor and the application requirements. 64-fold micro-stepping ensures particularly quiet and precise motor operation.
EL7037 | EtherCAT Terminal, 1-channel motion interface, stepper motor, 24 V DC, 1.5 A, with incremental encoder
The EL7037 EtherCAT Terminal is intended for the direct connection of stepper motors in the low power range up to 1.5 A. The compact stepper motor output stage is accommodated in the EtherCAT Terminal together with two digital inputs for limit switches. Through parameterization, the EL7037 can be adjusted to the motor and the application requirements. 64-fold micro-stepping ensures particularly quiet and precise motor operation.
EL7041 | EtherCAT Terminal, 1-channel motion interface, stepper motor, 48 V DC, 5 A, with incremental encoder
The EL7041 EtherCAT Terminal is intended for the direct connection of stepper Motors in the mid power range up to 5 A an a voltage range from 8…48 V. The compact stepper motor output stage is accommodated in the EtherCAT Terminal together with two digital inputs for limit switches an one encoder interface. Through parameterization, the EL7041 can be adjusted to the motor and the application requirements. 64-fold micro-stepping ensures particularly quiet and precise motor operation.
EL7041-0052 | EtherCAT Terminal, 1-channel motion interface, stepper motor, 48 V DC, 5 A
The EL7041-0052 EtherCAT Terminal is intended for the direct connection of stepper motors in the mid power range up to 5 A an a voltage range from 8…48 V. The compact stepper motor output stage is accommodated in the EtherCAT Terminal together with two digital inputs for limit switches. Through parameterization, the EL7041-0052 can be adjusted to the motor and the application requirements. 64-fold micro-stepping ensures particularly quiet and precise motor operation.
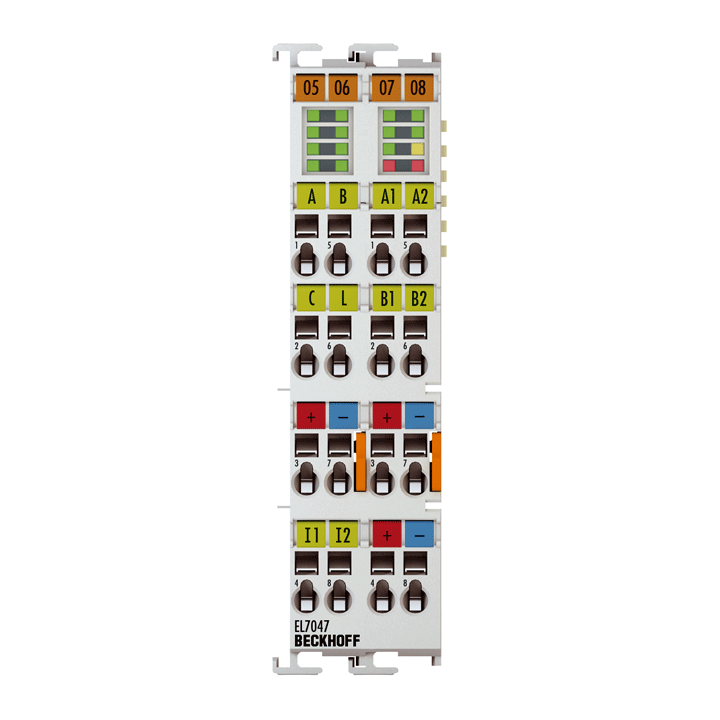
EL7047 | EtherCAT Terminal, 1-channel motion interface, stepper motor, 48 V DC, 5 A, vector control, with incremental encoder
The EL7047 EtherCAT Terminal is intended for the direct connection of stepper Motors in the mid power range up to 5 A an a voltage range from 8…48 V. The compact stepper motor output stage is accommodated in the EtherCAT Terminal together with two digital inputs for limit switches. Through parameterization, the EL7047 can be adjusted to the motor and the application requirements. 64-fold micro-stepping ensures particularly quiet and precise motor operation.
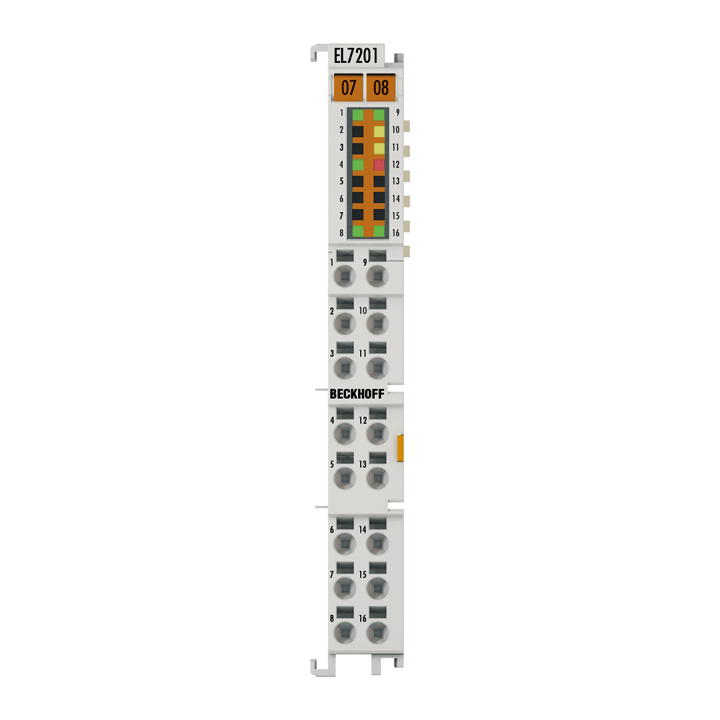
EL7201 | EtherCAT Terminal, 1-channel motion interface, servomotor, 48 V DC, 2.8 A, resolver
The EL7201 servomotor EtherCAT Terminal, with integrated resolver interface, offers high servo performance in a very compact design. The fast control technology, based on field-oriented current and PI speed control, supports fast and highly dynamic positioning tasks. The monitoring of numerous parameters, such as overvoltage and undervoltage, overcurrent, terminal temperature or motor load via the calculation of a I²T model, offers maximum operational reliability. EtherCAT, as a high-performance system communication, and CAN-over-EtherCAT (CoE), as the application layer, enable ideal interfacing with PC-based control technology. The latest power semiconductors guarantee minimum power loss and enable feedback into the DC link when braking. 16 LEDs indicate status, warning and error messages as well as possibly active limitations.
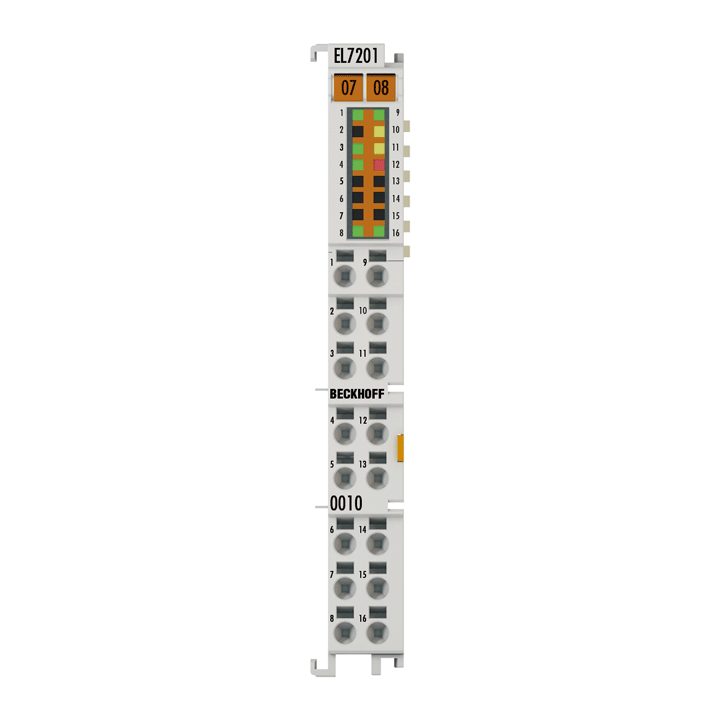
EL7201-0010 | EtherCAT Terminal, 1-channel motion interface, servomotor, 48 V DC, 2.8 A, OCT
The EL7201-0010 servomotor EtherCAT Terminal with integrated absolute value interface offers high servo performance in a very compact design. The fast control technology, based on field-oriented current and PI speed control, supports fast and highly dynamic positioning tasks. The monitoring of numerous parameters, such as overvoltage and undervoltage, overcurrent, terminal temperature or motor load via the calculation of a I²T model, offers maximum operational reliability. EtherCAT, as a high-performance system communication, and CAN-over-EtherCAT (CoE), as the application layer, enable ideal interfacing with PC-based control technology. The latest power semiconductors guarantee minimum power loss and enable feedback into the DC link when braking. 16 LEDs indicate status, warning and error messages as well as possibly active limitations.
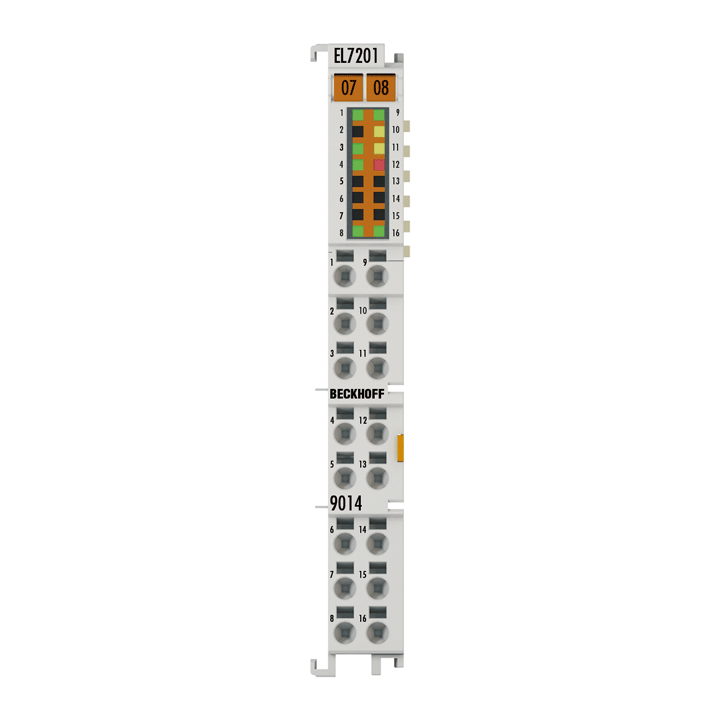
EL7201-9014 | EtherCAT Terminal, 1-channel motion interface, servomotor, 48 V DC, 2.8 A, OCT, suitable for STO applications
The EL7201-9014 servomotor EtherCAT Terminal with integrated absolute value interface offers high servo performance in a very compact design. The fast control technology, based on field-oriented current and PI speed control, supports fast and highly dynamic positioning tasks. The monitoring of numerous parameters, such as overvoltage and undervoltage, overcurrent, terminal temperature or motor load via the calculation of a I²T model, offers maximum operational reliability. EtherCAT, as a high-performance system communication, and CAN-over-EtherCAT (CoE), as the application layer, enable ideal interfacing with PC-based control technology. The latest power semiconductors guarantee minimum power loss and enable feedback into the DC link when braking. 16 LEDs indicate status, warning and error messages as well as possibly active limitations.
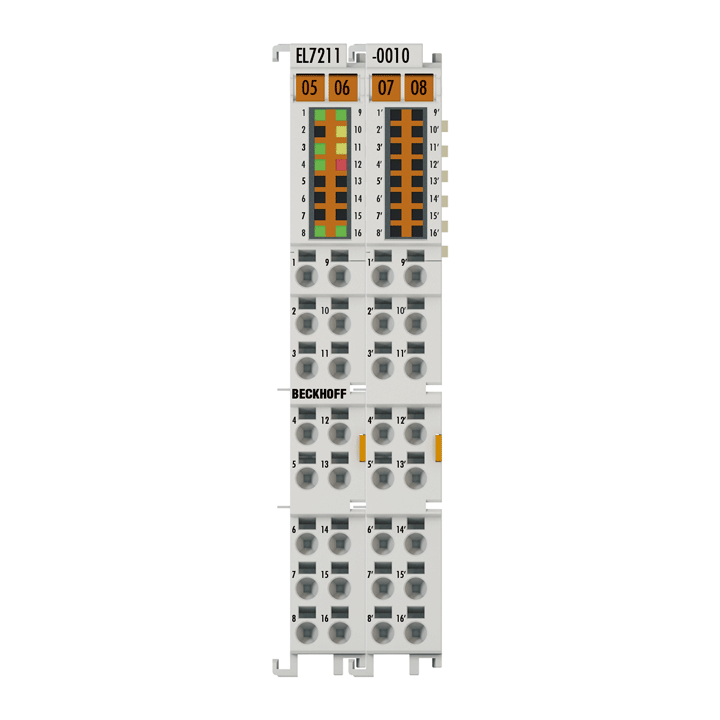
EL7211-0010 | EtherCAT Terminal, 1-channel motion interface, servomotor, 48 V DC, 4.5 A, OCT
The EL7211-0010 servomotor EtherCAT Terminal with integrated One Cable Technology (OCT) offers high servo performance in a very compact design for motors from the AM8100 up to 4.5 A (Irms). The One Cable Technology combines a motor cable and an absolute feedback system in a single cable. The integrated electronic type plate of the AM81xx motors can be read in automatically by the servo terminal to configure the motor parameters automatically. Thus, wiring and commissioning expenditure are minimized.
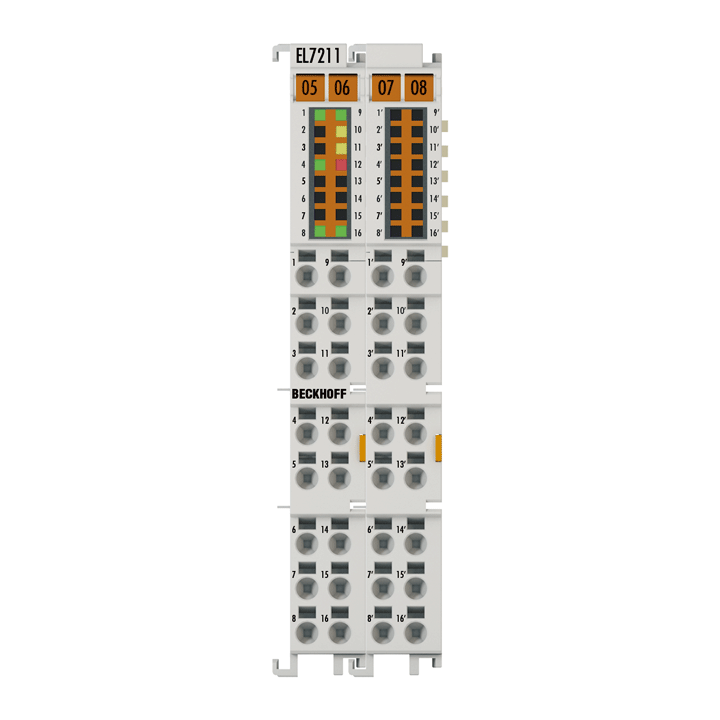
EL7211 | EtherCAT Terminal, 1-channel motion interface, servomotor, 48 V DC, 4.5 A, resolver
The EL7211 servomotor EtherCAT Terminal with integrated resolver interface offers high servo performance in a very compact design for motors from the AM8100 and AM3100 series up to 4.5 A (Irms). The fast control technology, based on field-orientated current and PI speed control, supports fast and highly dynamic positioning tasks.
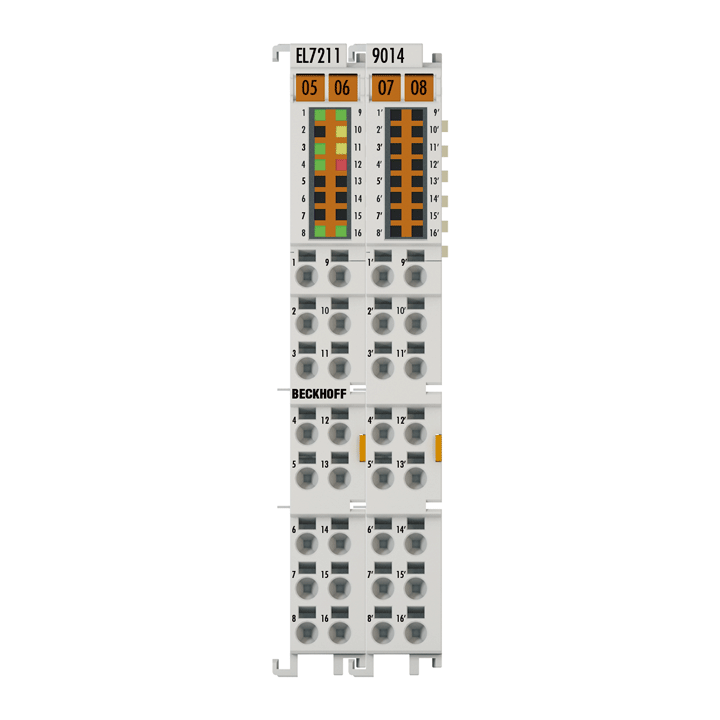
EL7211-9014 | EtherCAT Terminal, 1-channel motion interface, servomotor, 48 V DC, 4.5 A, OCT, suitable for STO applications
The EL7211-9014 servomotor EtherCAT Terminal with integrated One Cable Technology (OCT) offers high servo performance in a very compact design for motors from the AM8100 up to 4.5 A (Irms). The One Cable Technology combines a motor cable and an absolute feedback system in a single cable. The integrated electronic type plate of the AM81xx motors can be read in automatically by the servo terminal to configure the motor parameters automatically. Thus, wiring and commissioning expenditure are minimized.
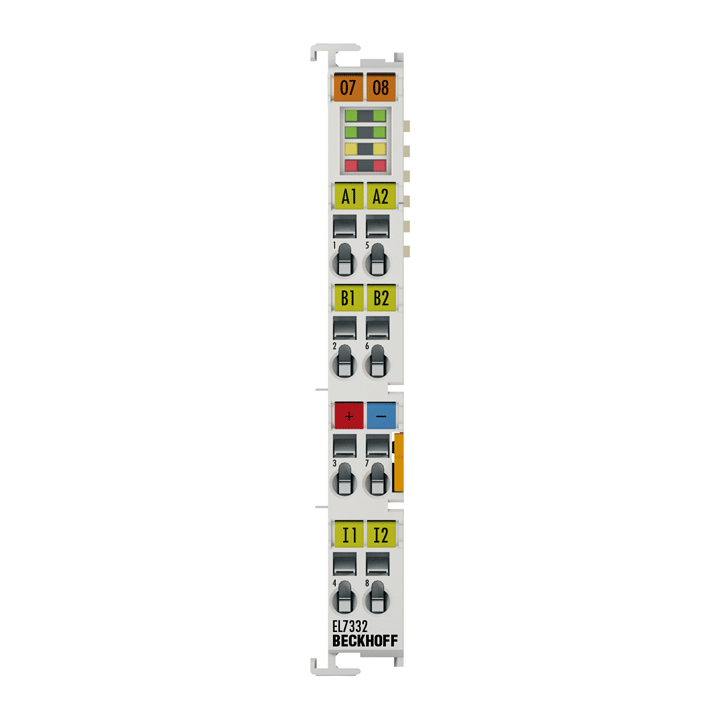
EL7332 | EtherCAT Terminal, 2-channel motion interface, DC motor, 24 V DC, 1 A
The EL7332 EtherCAT Terminal enables direct operation of two DC motors. It is galvanically isolated from the E-bus. The speed is preset by a 16 bit value from the automation unit. The output stage is protected against overload and short-circuit, the common thermal overload warning applies to both output stages together. The EtherCAT Terminal has two channels that indicate their signal state via light emitting diodes. The LEDs enable quick local diagnosis.
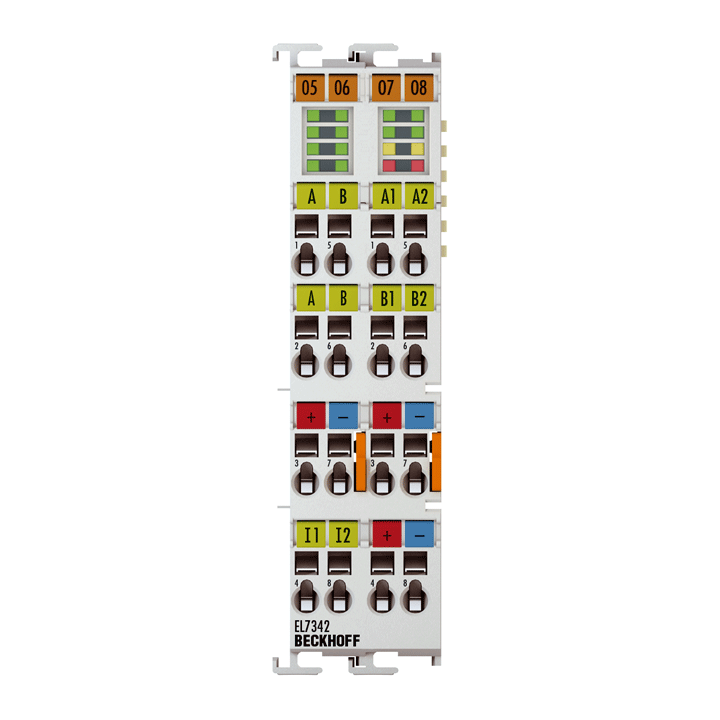
EL7342 | EtherCAT Terminal, 2-channel motion interface, DC motor, 48 V DC, 3.5 A
The EL7342 EtherCAT Terminal enables direct operation of two DC motors. It is galvanically isolated from the E-bus. The speed or position is specified by the automation device via a 16 bit value. Connection of an incremental encoder enables a simple servo axis to be realized. The output stage is protected against overload and short-circuit, the common thermal overload warning applies to both output stages together. The EtherCAT Terminal has two channels that indicate their signal state via light emitting diodes. The LEDs enable quick local diagnosis.
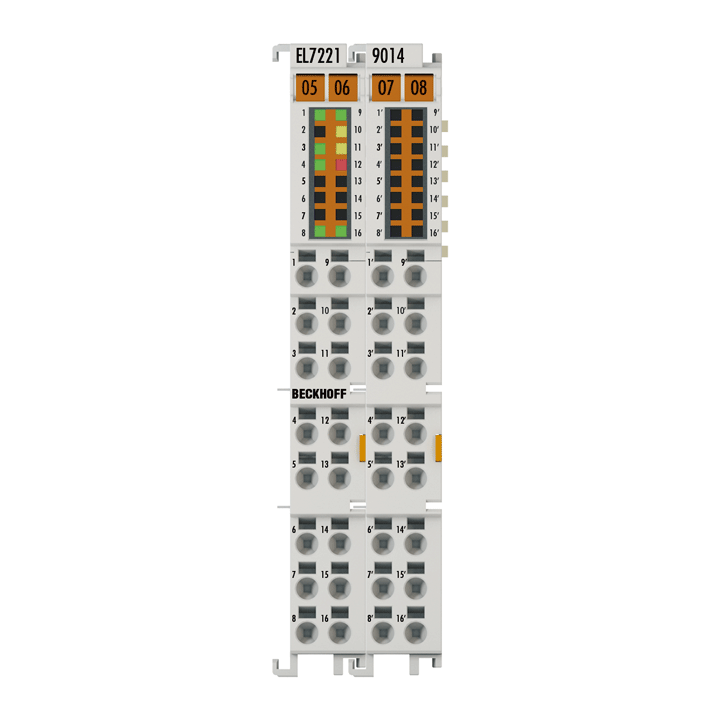
EL7221-9014 | EtherCAT Terminal, 1-channel motion interface, servomotor, 48 V DC, 8 A, OCT, suitable for STO applications
The EL7221-9014 servomotor EtherCAT Terminal with integrated One Cable Technology (OCT) offers powerful servo performance in a very compact design for motors from the AM8100 series up to 8 A (Irms). OCT combines a motor cable and an absolute feedback system in a single cable. The integrated electronic type plate of the AM81xx motors can be read in by the servo terminal to configure the motor parameters automatically. Thus, commissioning of the motors as well as cabling are minimized. The high-performance control technology supports fast and highly dynamic positioning tasks. Monitoring of numerous integrated parameters offers maximum operational reliability. The specified output power is attained in operation with the ZB8610 fan cartridge. For operation without a fan cartridge, the EL7211-9014 is recommended. The STO function according to EN 61800-5-2, can be implemented using the reaction-free HWE input corresponding to a safety level Cat. 3, PL d according to DIN EN ISO 13849-1:2015 (see document "EP7211-0034 | TwinSAFE application example").
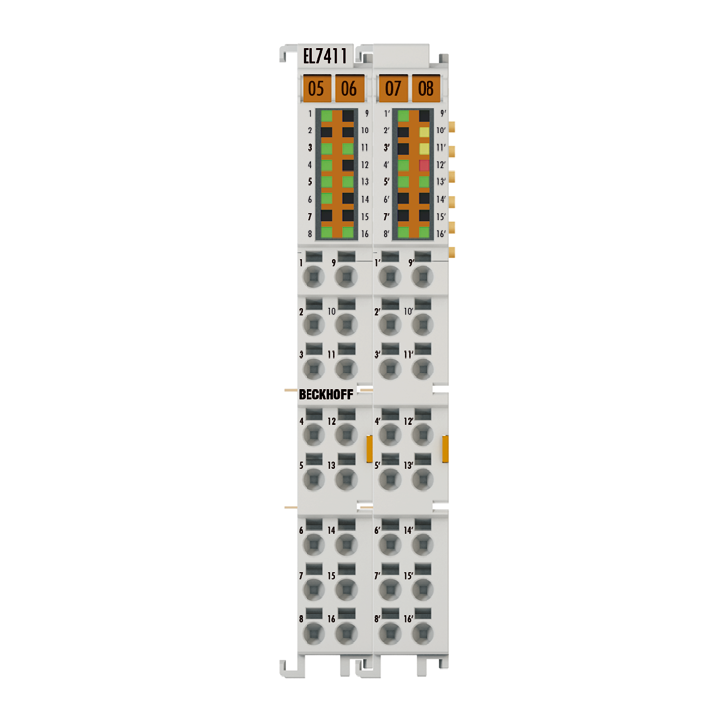
EL7411 | EtherCAT Terminal, 1-channel motion interface, BLDC motor, 48 V DC, 4.5 A, with incremental encoder
The EL7411 BLDC motor terminal provides high control performance in a very compact design for the medium output range of BLDC motors. Due to the fast control technology and the connection of an incremental encoder, both very high speed profiles and dynamic positioning tasks can be implemented. Maximum operational reliability is provided through the monitoring of numerous parameters, such as overvoltage, undervoltage, overcurrent, terminal temperature or motor load via the calculation of an I²T model. The terminal’s output current can be increased in conjunction with the ZB8610 fan cartridge.

ELM3002-0000 | EtherCAT Terminal, 2-channel analog input, voltage, ±30 V…±20 mV, 24 bit, 20 ksps
The ELM300x EtherCAT Terminals are designed for flexible voltage measurement from 20 mV to 30 V in eleven measuring ranges. The measuring range is selected in the CoE, as are the other setting options such as the filter parameters. Irrespective of the signal configuration, all ELM modules have the same technological properties. The ELM300x modules for voltage measurement offer a maximum sampling rate of 10,000 or 20,000 samples per second. The 2-pin plug (push-in) can be removed for maintenance purposes without releasing the individual wires.

ELM3002-0030 | EtherCAT Terminal, 2-channel analog input, voltage, ±30 V…±20 mV, 24 bit, 20 ksps, externally calibrated
The ELM300x EtherCAT Terminals are designed for flexible voltage measurement from 20 mV to 30 V in eleven measuring ranges. The measuring range is selected in the CoE, as are the other setting options such as the filter parameters. Irrespective of the signal configuration, all ELM modules have the same technological properties. The ELM300x modules for voltage measurement offer a maximum sampling rate of 10,000 or 20,000 samples per second. The 2-pin plug (push-in) can be removed for maintenance purposes without releasing the individual wires.

ELM3004-0000 | EtherCAT Terminal, 4-channel analog input, voltage, ±30 V…±20 mV, 24 bit, 10 ksps
The ELM300x EtherCAT Terminals are designed for flexible voltage measurement from 20 mV to 30 V in eleven measuring ranges. The measuring range is selected in the CoE, as are the other setting options such as the filter parameters. Irrespective of the signal configuration, all ELM modules have the same technological properties. The ELM300x modules for voltage measurement offer a maximum sampling rate of 10,000 or 20,000 samples per second. The 2-pin plug (push-in) can be removed for maintenance purposes without releasing the individual wires.

ELM3004-0030 | EtherCAT Terminal, 4-channel analog input, voltage, ±30 V…±20 mV, 24 bit, 10 ksps, externally calibrated
The ELM300x EtherCAT Terminals are designed for flexible voltage measurement from 20 mV to 30 V in eleven measuring ranges. The measuring range is selected in the CoE, as are the other setting options such as the filter parameters. Irrespective of the signal configuration, all ELM modules have the same technological properties. The ELM300x modules for voltage measurement offer a maximum sampling rate of 10,000 or 20,000 samples per second. The 2-pin plug (push-in) can be removed for maintenance purposes without releasing the individual wires.

ELM3102-0000 | EtherCAT Terminal, 2-channel analog input, current, ±20 mA, 24 bit, 20 ksps
The ELM310x EtherCAT Terminals are designed for flexible current measurement in the range from -20 to +20 mA. They offer selectable measuring ranges of -20/0/4 to ±20 mA as well as current measurement according to NAMUR NE43.

ELM3104-0000 | EtherCAT Terminal, 4-channel analog input, current, ±20 mA, 24 bit, 10 ksps
The ELM310x EtherCAT Terminals are designed for flexible current measurement in the range from -20 to +20 mA. They offer selectable measuring ranges of -20/0/4 to ±20 mA as well as current measurement according to NAMUR NE43.

ELM3142-0000 | EtherCAT Terminal, 2-channel analog input, multi-function, ±10…±1.25 V, ±20 mA, 24 bit, 1 ksps
The 2-, 4-, 6- or 8-channel ELM314x EtherCAT Terminals in the Economy line can be set to current or voltage measurement channel by channel, offering sampling rates of up to 1 ksps per channel. Analog signals in the ranges from ±1.25 to ±10 V, 0 to 10 V, ±20 mA or 0/4 to 20 mA can be processed. The settings for U or I measurement mode and the desired measuring ranges can be selected via the control system and TwinCAT in the CoE interface. Here it is also possible to select the extensive diagnostics features for unattended long-term use. The 2-, 4- or 6-pin push-in connectors can be removed for maintenance purposes; they enable a direct supply of connected sensors. The power contacts on the side simplify the potential distribution directly on the DIN rail. The typical EtherCAT features are available: distributed clocks functionality with timestamp and the familiar data features of the basic line such as filtering, true RMS calculation and more.
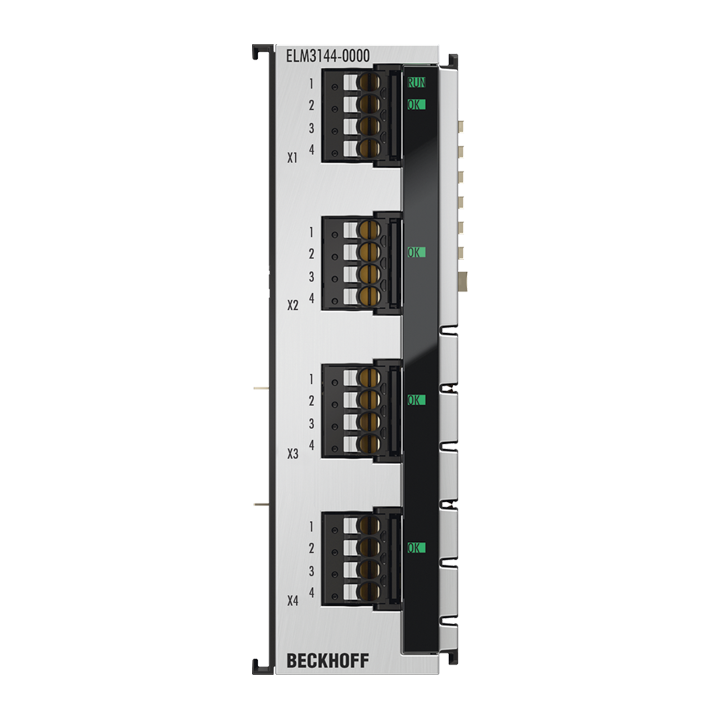
ELM3144-0000 | EtherCAT Terminal, 4-channel analog input, multi-function, ±10…±1.25 V, ±20 mA, 24 bit, 1 ksps
The 2-, 4-, 6- or 8-channel ELM314x EtherCAT Terminals in the Economy line can be set to current or voltage measurement channel by channel, offering sampling rates of up to 1 ksps per channel. Analog signals in the ranges from ±1.25 to ±10 V, 0 to 10 V, ±20 mA or 0/4 to 20 mA can be processed. The settings for U or I measurement mode and the desired measuring ranges can be selected via the control system and TwinCAT in the CoE interface. Here it is also possible to select the extensive diagnostics features for unattended long-term use. The 2-, 4- or 6-pin push-in connectors can be removed for maintenance purposes; they enable a direct supply of connected sensors. The power contacts on the side simplify the potential distribution directly on the DIN rail. The typical EtherCAT features are available: distributed clocks functionality with timestamp and the familiar data features of the basic line such as filtering, true RMS calculation and more.

ELM3146-0000 | EtherCAT Terminal, 6-channel analog input, multi-function, ±10…±1.25 V, ±20 mA, 24 bit, 1 ksps
The 2-, 4-, 6- or 8-channel ELM314x EtherCAT Terminals in the Economy line can be set to current or voltage measurement channel by channel, offering sampling rates of up to 1 ksps per channel. Analog signals in the ranges from ±1.25 to ±10 V, 0 to 10 V, ±20 mA or 0/4 to 20 mA can be processed. The settings for U or I measurement mode and the desired measuring ranges can be selected via the control system and TwinCAT in the CoE interface. Here it is also possible to select the extensive diagnostics features for unattended long-term use. The 2-, 4- or 6-pin push-in connectors can be removed for maintenance purposes; they enable a direct supply of connected sensors. The power contacts on the side simplify the potential distribution directly on the DIN rail. The typical EtherCAT features are available: distributed clocks functionality with timestamp and the familiar data features of the basic line such as filtering, true RMS calculation and more.

ELM3148-0000 | EtherCAT Terminal, 8-channel analog input, multi-function, ±10…±1.25 V, ±20 mA, 24 bit, 1 ksps
The 2-, 4-, 6- or 8-channel ELM314x EtherCAT Terminals in the Economy line can be set to current or voltage measurement channel by channel, offering sampling rates of up to 1 ksps per channel. Analog signals in the ranges from ±1.25 to ±10 V, 0 to 10 V, ±20 mA or 0/4 to 20 mA can be processed. The settings for U or I measurement mode and the desired measuring ranges can be selected via the control system and TwinCAT in the CoE interface. Here it is also possible to select the extensive diagnostics features for unattended long-term use. The 2-, 4- or 6-pin push-in connectors can be removed for maintenance purposes; they enable a direct supply of connected sensors. The power contacts on the side simplify the potential distribution directly on the DIN rail. The typical EtherCAT features are available: distributed clocks functionality with timestamp and the familiar data features of the basic line such as filtering, true RMS calculation and more.

ELM3502-0000 | EtherCAT Terminal, 2-channel analog input, measuring bridge, full/half/quarter bridge, 24 bit, 20 ksps
The ELM350x EtherCAT Terminals are designed for the evaluation of measuring bridges in full-bridge, half-bridge and quarter-bridge configuration. The terminals feature internally switchable supplementary resistors. The feed is integrated. Like all other parameters, the supply voltage is adjustable in the CoE. Irrespective of the signal configuration, all ELM modules have the same technological properties. The ELM350x modules for the evaluation of measuring bridges offer a maximum sampling rate of 10,000 or 20,000 samples per second. The 6-pin plug (push-in) can be removed for maintenance purposes without releasing the individual wires.

ELM3502-0030 | EtherCAT Terminal, 2-channel analog input, measuring bridge, full/half/quarter bridge, 24 bit, 20 ksps, externally calibrated
The ELM350x EtherCAT Terminals are designed for the evaluation of measuring bridges in full-bridge, half-bridge and quarter-bridge configuration. The terminals feature internally switchable supplementary resistors. The feed is integrated. Like all other parameters, the supply voltage is adjustable in the CoE. Irrespective of the signal configuration, all ELM modules have the same technological properties. The ELM350x modules for the evaluation of measuring bridges offer a maximum sampling rate of 10,000 or 20,000 samples per second. The 6-pin plug (push-in) can be removed for maintenance purposes without releasing the individual wires.

ELM3504-0000 | EtherCAT Terminal, 4-channel analog input, measuring bridge, full/half/quarter bridge, 24 bit, 10 ksps
The ELM350x EtherCAT Terminals are designed for the evaluation of measuring bridges in full-bridge, half-bridge and quarter-bridge configuration. The terminals feature internally switchable supplementary resistors. The feed is integrated. Like all other parameters, the supply voltage is adjustable in the CoE. Irrespective of the signal configuration, all ELM modules have the same technological properties. The ELM350x modules for the evaluation of measuring bridges offer a maximum sampling rate of 10,000 or 20,000 samples per second. The 6-pin plug (push-in) can be removed for maintenance purposes without releasing the individual wires.

ELM3504-0030 | EtherCAT Terminal, 4-channel analog input, measuring bridge, full/half/quarter bridge, 24 bit, 10 ksps, externally calibrated
The ELM350x EtherCAT Terminals are designed for the evaluation of measuring bridges in full-bridge, half-bridge and quarter-bridge configuration. The terminals feature internally switchable supplementary resistors. The feed is integrated. Like all other parameters, the supply voltage is adjustable in the CoE. Irrespective of the signal configuration, all ELM modules have the same technological properties. The ELM350x modules for the evaluation of measuring bridges offer a maximum sampling rate of 10,000 or 20,000 samples per second. The 6-pin plug (push-in) can be removed for maintenance purposes without releasing the individual wires.

ELM3542-0000 | EtherCAT Terminal, 2-channel analog input, measuring bridge, full/half/quarter bridge, 24 bit, 1 ksps, TEDS
The ELM3542 and ELM3544 EtherCAT Terminals from the ELM3x4x economy series are designed for the evaluation of measuring bridges in full bridge, half bridge and quarter bridge configuration. With a maximum data rate of 1 ksps per channel they are ideally suited for the recording of less dynamic procedures, such as slow oscillations and corresponding weighing procedures. In return, they measure with extremely low noise and are temperature-stable up to an ambient temperature of 60°C. The integrated bridge supply can supply 1 to 12 V and, like all other parameters, is adjustable online in the CoE at runtime. In addition, the ELM3542 features a connection for one TEDS-IC in the sensor per channel – this way the SG can be electronically read, detected and also written immediately upon plugging in. Apart from that, the ELM354x have all the features familiar from the fast ELM350x basic series, such as internally switchable extension resistors and comprehensive sensor and function diagnostics for industrial 24/7 operation. The 6-pin connector (push-in) is removable for maintenance purposes without releasing the individual wires.

ELM3544-0000 | EtherCAT Terminal, 4-channel analog input, measuring bridge, full/half/quarter bridge, 24 bit, 1 ksps
The ELM3542 and ELM3544 EtherCAT Terminals from the ELM3x4x economy series are designed for the evaluation of measuring bridges in full bridge, half bridge and quarter bridge configuration. With a maximum data rate of 1 ksps per channel they are ideally suited for the recording of less dynamic procedures, such as slow oscillations and corresponding weighing procedures. In return, they measure with extremely low noise and are temperature-stable up to an ambient temperature of 60°C. The integrated bridge supply can supply 1 to 12 V and, like all other parameters, is adjustable online in the CoE at runtime. In addition, the ELM3542 features a connection for one TEDS-IC in the sensor per channel – this way the SG can be electronically read, detected and also written immediately upon plugging in. Apart from that, the ELM354x have all the features familiar from the fast ELM350x basic series, such as internally switchable extension resistors and comprehensive sensor and function diagnostics for industrial 24/7 operation. The 6-pin connector (push-in) is removable for maintenance purposes without releasing the individual wires.

ELM3602-0000 | EtherCAT Terminal, 2-channel analog input, IEPE/accelerometer, 24 bit, 50 ksps
The ELM360x EtherCAT Terminals are designed for the evaluation of IEPE sensors (Integrated Electronics Piezo-Electric), which are mainly used for vibration diagnostics and acoustics. The constant current feed can be set to 0/2/4 mA. The input characteristics are also flexibly adjustable from DC to 10 Hz in the CoE. The ELM360x basically measures voltages AC/DC and in addition, the internal scaler function can be used if, for example, an output in acceleration [m/s²] is desired. In voltage measurement mode 12 different measurement ranges from ±20 mV to ±10 V and 0 to 20 V are adjustable.

ELM3602-0002 | EtherCAT Terminal, 2-channel analog input, IEPE/accelerometer, 24 bit, 50 ksps, BNC
The ELM360x EtherCAT Terminals are designed for the evaluation of IEPE sensors (Integrated Electronics Piezo-Electric), which are mainly used for vibration diagnostics and acoustics. The constant current feed can be set to 0/2/4 mA. The input characteristics are also flexibly adjustable from DC to 10 Hz in the CoE. The ELM360x basically measures voltages AC/DC and in addition, the internal scaler function can be used if, for example, an output in acceleration [m/s²] is desired. In voltage measurement mode 12 different measurement ranges from ±20 mV to ±10 V and 0 to 20 V are adjustable.

ELM3604-0000 | EtherCAT Terminal, 4-channel analog input, IEPE/accelerometer, 24 bit, 20 ksps
The ELM360x EtherCAT Terminals are designed for the evaluation of IEPE sensors (Integrated Electronics Piezo-Electric), which are mainly used for vibration diagnostics and acoustics. The constant current feed can be set to 0/2/4 mA. The input characteristics are also flexibly adjustable from DC to 10 Hz in the CoE. The ELM360x basically measures voltages AC/DC and in addition, the internal scaler function can be used if, for example, an output in acceleration [m/s²] is desired. In voltage measurement mode 12 different measurement ranges from ±20 mV to ±10 V and 0 to 20 V are adjustable.

ELM3604-0002 | EtherCAT Terminal, 4-channel analog input, IEPE/accelerometer, 24 bit, 20 ksps, BNC
The ELM360x EtherCAT Terminals are designed for the evaluation of IEPE sensors (Integrated Electronics Piezo-Electric), which are mainly used for vibration diagnostics and acoustics. The constant current feed can be set to 0/2/4 mA. The input characteristics are also flexibly adjustable from DC to 10 Hz in the CoE. The ELM360x basically measures voltages AC/DC and in addition, the internal scaler function can be used if, for example, an output in acceleration [m/s²] is desired. In voltage measurement mode 12 different measurement ranges from ±20 mV to ±10 V and 0 to 20 V are adjustable.

ELM3702-0000 | EtherCAT Terminal, 2-channel analog input, multi-function, 24 bit, 10 ksps
The EtherCAT Terminals from the ELM series were developed in order to enable the high-quality measurement of common electrical signals in the industrial environment. Flexibly usable measurement modules are especially useful in laboratory and testing technology environments. Therefore the ELM370x multi-function modules feature an input circuit that can be set to over 30 different types of electrical connection via EtherCAT: from voltages of ±60 V to ±20 mV, thus supporting thermocouples and IEPE, a current of ±20 mA, a resistance measurement of 5 kΩ and thus also temperature RTDs (Pt100, etc.), measuring bridges and potentiometers, and all of this with a 2- to 6-wire connection, depending on the type. Thus, most electrical measuring tasks can be solved with just a single module. There is a choice of different connection types: The ELM3704-0001 with its high-quality LEMO connectors is mainly designed for laboratory use, where sensor configurations are changed on a daily basis, but a stable and reliable plug connection is nevertheless required. The 6-pin version with push-in (ELM3704-0000/ELM3702-0000) on the other hand is ideal for industrial use where a plug is unplugged less frequently for maintenance purposes and fast wiring is much more important.

ELM3704-0000 | EtherCAT Terminal, 4-channel analog input, multi-function, 24 bit, 10 ksps
The EtherCAT Terminals from the ELM series were developed in order to enable the high-quality measurement of common electrical signals in the industrial environment. Flexibly usable measurement modules are especially useful in laboratory and testing technology environments. Therefore the ELM370x multi-function modules feature an input circuit that can be set to over 30 different types of electrical connection via EtherCAT: from voltages of ±60 V to ±20 mV, thus supporting thermocouples and IEPE, a current of ±20 mA, a resistance measurement of 5 kΩ and thus also temperature RTDs (Pt100, etc.), measuring bridges and potentiometers, and all of this with a 2- to 6-wire connection, depending on the type. Thus, most electrical measuring tasks can be solved with just a single module. There is a choice of different connection types: The ELM3704-0001 with its high-quality LEMO connectors is mainly designed for laboratory use, where sensor configurations are changed on a daily basis, but a stable and reliable plug connection is nevertheless required. The 6-pin version with push-in (ELM3704-0000/ELM3702-0000) on the other hand is ideal for industrial use where a plug is unplugged less frequently for maintenance purposes and fast wiring is much more important.

ELM3704-0001 | EtherCAT Terminal, 4-channel analog input, multi-function, 24 bit, 10 ksps, LEMO
The EtherCAT Terminals from the ELM series were developed in order to enable the high-quality measurement of common electrical signals in the industrial environment. Flexibly usable measurement modules are especially useful in laboratory and testing technology environments. Therefore the ELM370x multi-function modules feature an input circuit that can be set to over 30 different types of electrical connection via EtherCAT: from voltages of ±60 V to ±20 mV, thus supporting thermocouples and IEPE, a current of ±20 mA, a resistance measurement of 5 kΩ and thus also temperature RTDs (Pt100, etc.), measuring bridges and potentiometers, and all of this with a 2- to 6-wire connection, depending on the type. Thus, most electrical measuring tasks can be solved with just a single module. There is a choice of different connection types: The ELM3704-0001 with its high-quality LEMO connectors is mainly designed for laboratory use, where sensor configurations are changed on a daily basis, but a stable and reliable plug connection is nevertheless required. The 6-pin version with push-in (ELM3704-0000/ELM3702-0000) on the other hand is ideal for industrial use where a plug is unplugged less frequently for maintenance purposes and fast wiring is much more important.

EP1258-0001 | EtherCAT Box, 8-channel digital input, 24 V DC, 1 µs, M8, timestamp
The EP1258-0001 EtherCAT Box with digital inputs acquires the fast binary control signals from the process level and transmits them, in an electrically isolated form, to the controller. The signals are furnished with a timestamp that identifies the time of the last edge change with a resolution of 1 ns. This technology enables signals to be traced exactly over time and synchronized with the distributed clocks across the system. With this technology, machine-wide parallel hardware wiring of digital inputs or encoder signals for synchronization purposes is often no longer required. In this way, the EP1258 enables responses with equidistant time intervals, largely independent of the bus cycle time.

EP3162-0002 | EtherCAT Box, 2-channel analog input, multi-function, ±10 V, ±20 mA, 16 bit, single-ended, electrically isolated, M12
The EP3162-0002 EtherCAT Box has two analog inputs which can be individually parameterized, so that they process signals either in the -10/0…+10 V or the -20/0/4…+20 mA range. The voltage or input current is digitized with a resolution of 16 bits, and is transmitted (electrically isolated) to the higher-level automation device. The two input channels are galvanically isolated. The input filter and therefore the conversion times are configurable in a wide range. If required, the inputs can be scaled differently, and automatic limit monitoring is also available. EtherCAT is used for parameterization purposes. The parameters are stored in the module.

EP3174-0002 | EtherCAT Box, 4-channel analog input, multi-function, ±10 V, 0/4…20 mA, 16 bit, differential, M12
The EP3174-0002 EtherCAT Box has four analog inputs which can be individually parameterized, so that they process signals either in the -10…+10 V or the 0/4…20 mA range. The voltage or input current is digitized with a resolution of 16 bits, and is transmitted (electrically isolated) to the higher-level automation device. The four input channels have differential inputs and possess a common, internal ground potential. The input filter and therefore the conversion times are configurable in a wide range. If required, the inputs can be scaled differently, and automatic limit monitoring is also available. EtherCAT is used for parameterization purposes. The parameters are stored in the module.

EP3174-0092 | EtherCAT Box, 4-channel analog input, multi-function, ±10 V, 0/4…20 mA, 16 bit, differential, M12, TwinSAFE SC
The EP3174-0092 EtherCAT Box has four analog inputs which can be individually parameterized, so that they process signals either in the -10…+10 V or the 0/4…20 mA range. The voltage or input current is digitized with a resolution of 16 bits, and is transmitted (electrically isolated) to the higher-level automation device. The four input channels have differential inputs and possess a common, internal ground potential. The input filter and therefore the conversion times are configurable in a wide range. If required, the inputs can be scaled differently, and automatic limit monitoring is also available. EtherCAT is used for parameterization purposes. The parameters are stored in the module.

EP3744-0041 | EtherCAT Box, 4-channel analog input + 8-channel digital combi, pressure, 0…1000 hPa (0…+1 bar), M8
The EP3744-0041 EtherCAT Box, equipped with six digital inputs, two digital outputs and four pressure inputs, acquires these signals and transmits them – electrically isolated – to the controller. The signal status is indicated by LEDs; the digital signals are connected via 4-pin M8 screw type connectors.

EP3744-1041 | EtherCAT Box, 4-channel analog input + 8-channel digital combi, pressure, 0…7000 hPa (0…+7 bar), M8
The EP3744-1041 EtherCAT Box, equipped with six digital inputs, two digital outputs and four pressure inputs, acquires these signals and transmits them – electrically isolated – to the controller. The signal status is indicated by LEDs; the digital signals are connected via 4-pin M8 screw type connectors.

EP5001-0002 | EtherCAT Box, 1-channel encoder interface, SSI, M12
The EP5001-0002 EtherCAT box is an SSI master and enables the direct connection of an absolute encoder with SSI (synchronous serial interface). Both singleturn and multiturn encoders are supported. An 8-pin M12 socket is used as encoder connection. The 24 V supply of the encoder is made directly via the M12 socket of the box.

EP5101-0002 | EtherCAT Box, 1-channel encoder interface, incremental, 5 V DC (DIFF RS422, TTL), 1 MHz, M12
The EP5101-0002 EtherCAT Box is an interface for the direct connection of incremental encoders with differential signals (RS422) or TTL single ended signals. Input frequencies up to 1 MHz can be evaluated. The C input can optionally be used as a latch input. The 5 V supply of the encoder is directly via the M12 socket of the EP5101-0002.

EP5101-0011 | EtherCAT Box, 1-channel encoder interface, incremental, 5 V DC (DIFF RS422, TTL), 1 MHz, D-sub
The EP5101-0011 EtherCAT Box is an interface for the direct connection of incremental encoders with differential signals (RS422) or TTL single ended signals. Input frequencies up to 1 MHz can be evaluated. Two additional 24 V digital inputs are available for storing, locking and setting the counter reading. The error message output of an encoder can be connected and evaluated via the status input. The 5 V supply of the encoder is directly provided via the D-sub socket of the EP5101-0011.

EP5101-1002 | EtherCAT Box, 1-channel encoder interface, incremental, 5 V DC (DIFF RS422, TTL), 1 MHz, M12, sensor supply 24 V DC
The EP5101-1002 EtherCAT Box is an interface for the direct connection of incremental encoders with differential signals (RS422) or TTL single ended signals. Input frequencies up to 1 MHz can be evaluated. The C input can optionally be used as a latch input. The 24 V supply of the encoder is directly via the M12 socket of the EP5101-1002.

EP5101-2011 | EtherCAT Box, 1-channel encoder interface, incremental, 5 V DC (DIFF RS422, TTL), 5 MHz, D-sub
The EP5101-2011 EtherCAT Box is an interface for the direct connection of incremental encoders with differential signals (RS422) or TTL single ended signals. Input frequencies up to 20 MHz can be evaluated. Two additional 24 V digital inputs are available for storing, locking and setting the counter reading. The error message output of an encoder can be connected and evaluated via the status input. The 5 V supply of the encoder is directly provided via the D-sub socket of the EP5101-2011.

EP5151-0002 | EtherCAT Box, 1-channel encoder interface, incremental, 24 V DC HTL, 100 kHz, M12
The EP5151-0002 EtherCAT Box is an interface for the direct connection of 24 V single ended signals. Two additional 24 V digital inputs are available for storing, locking and setting the counter reading. The error message output of an encoder can be connected and evaluated via the status input. The 24 V supply of the encoder is directly provided via the M12 socket of the EP5151-0002.

EP7041-0002 | EtherCAT Box, 1-channel motion interface, stepper motor, 48 V DC, 5 A, M12, with incremental encoder
The EP7041 EtherCAT Box is intended for the direct connection of different stepper motors. The PWM output stages for two motor coils with compact design are located in the module together with two inputs for limit switches and cover a wide voltage and current range. The EP7041 can be adjusted to the motor and the application by changing just a few parameters. 64-fold micro-stepping ensures particularly quiet and precise motor operation. Connection of an incremental encoder enables a simple servo axis to be realized. Two digital inputs and a digital 0.5 A output enable connection of end switches and a motor brake.

EP7041-1002 | EtherCAT Box, 1-channel motion interface, stepper motor, 48 V DC, 1.5 A, M12, with incremental encoder
The EP7041-1002 EtherCAT Box is intended for the direct connection of different Stepper Motors. The PWM output stages for two motor coils with compact design are located in the module together with two inputs for limit switches and cover a wide voltage and current range. The EP7041-1002 can be adjusted to the motor and the application by changing just a few parameters. 64-fold micro-stepping ensures particularly quiet and precise motor operation. Connection of an incremental encoder enables a simple servo axis to be realized. Two digital inputs and a digital 0.5 A output enable connection of end switches and a motor brake.

EP7041-2002 | EtherCAT Box, 1-channel motion interface, stepper motor, 48 V DC, 5 A, M12, with incremental encoder
The EP7041-2002 EtherCAT Box is intended for the direct connection of different stepper motors. The PWM output stages for two motor coils with compact design are located in the module together with two inputs for limit switches and cover a wide voltage and current range. The EP7041-2002 can be adjusted to the motor and the application by changing just a few parameters. 64-fold micro-stepping ensures particularly quiet and precise motor operation. Connection of an incremental encoder enables a simple servo axis to be realized. Two digital inputs and a digital 0.5 A output enable connection of end switches and a motor brake. The external motor is fed via an integrated plug.

EP7041-3002 | EtherCAT Box, 1-channel motion interface, stepper motor, 48 V DC, 5 A, for high-speed applications, M12, with incremental encoder
The EP7041-3002 EtherCAT Box is intended for the direct connection of different stepper motors. The PWM output stages for two motor coils cover a wide voltage and current range. The EP7041-3002 can be adjusted to the motor and the application by changing just a few parameters. 256-fold micro-stepping ensures particularly quiet and precise motor operation. Connection of an incremental encoder enables a simple servo axis to be realized. Two digital inputs and a digital 0.5 A output enable connection of end switches and a motor brake.

EP7041-3102 | EtherCAT Box, 1-channel motion interface, stepper motor, 48 V DC, 5 A, for high-speed applications, M12, with incremental encoder
The EP7041-3102 EtherCAT Box is intended for the direct connection of different stepper motors. The PWM output stages for two motor coils cover a wide voltage and current range. The EP7041-3102 can be adjusted to the motor and the application by changing just a few parameters. 256-fold micro-stepping ensures particularly quiet and precise motor operation. Connection of an incremental encoder enables a simple servo axis to be realized. Two digital inputs and a digital 0.5 A output enable connection of end switches and a motor brake.

EP7211-0034 | EtherCAT Box, 1-channel motion interface, servomotor, 48 V DC, 4.5 A, OCT, suitable for STO applications
The EP7211-0034 servomotor EtherCAT Box with integrated One Cable Technology (OCT) offers high servo performance in a very compact design for AM8100 series motors with up to 4.5 A (Irms). The One Cable Technology combines motor cable and absolute feedback system in a single cable. The integrated electronic identification plate of the AM81xx motors can be read in automatically by the servo box to configure the motor parameters. In this way, wiring and commissioning requirements are simplified.

EP7342-0002 | EtherCAT Box, 2-channel motion interface, DC motor, 48 V DC, 3.5 A, M12, with incremental encoder
The EP7342-0002 EtherCAT Box enables direct operation of two DC motors. The speed or position is specified by the automation device via a 16 bit value. By connection of an incremental encoder (24 V DC, single-ended), a simple servo axis can be realized. The output stage is protected against overload and short-circuit. The EtherCAT Box has two channels that indicate their signal state via light emitting diodes. The LEDs enable quick local diagnostics.

EP7402-0057 | EtherCAT Box, 2-channel motion interface, BLDC motor, 24 V DC, 3.5 A, M8, EtherCAT junction
The EP7402-0057 EtherCAT Box offers two outputs with integrated MDR controller for the direct connection of 24 V DC conveyor roller motors or other BLDC motors with max. 3.5 A. Eight additional digital inputs/outputs enable connection of e.g. photoelectric switches and communication between the box modules in operation without PLC.
EL3101 | EtherCAT Terminal, 1-channel analog input, voltage, ±10 V, 16 bit, differential
The EL3101 analog input terminal handles signals in the range between -10 and +10 V. The voltage is digitized to a resolution of 16 bits, and is transmitted, electrically isolated, to the higher-level automation device. The input channels of the EtherCAT Terminal have differential inputs and possess a common, internal ground potential. The signal state of the EtherCAT Terminal is indicated by light emitting diodes.
EL3102 | EtherCAT Terminal, 2-channel analog input, voltage, ±10 V, 16 bit, differential
The EL3102 analog input terminal handles signals in the range between -10 and +10 V. The voltage is digitized to a resolution of 16 bits, and is transmitted, electrically isolated, to the higher-level automation device. The input channels of the EtherCAT Terminal have differential inputs and possess a common, internal ground potential. The signal state of the EtherCAT Terminal is indicated by light emitting diodes.

EL3104 | EtherCAT Terminal, 4-channel analog input, voltage, ±10 V, 16 bit, differential
The EL3104 analog input terminal processes signals in the range between -10 and +10 V. The voltage is digitized to a resolution of 16 bits, and is transmitted, electrically isolated, to the higher-level automation device. The input channels of the EL3104 EtherCAT Terminal are differential inputs. The signal state of the EtherCAT Terminal is indicated by light emitting diodes.
EL3111 | EtherCAT Terminal, 1-channel analog input, current, 0…20 mA, 16 bit, differential
The EL3111 analog input terminal processes signals in the range between 0 and 20 mA. The current is digitized to a resolution of 16 bits and is transmitted, electrically isolated, to the higher-level automation device. The input channels of the EtherCAT Terminal have differential inputs and possess a common, internal ground potential. The EL3111 is the single-channel version and is characterized by its fine granularity and electrical isolation. Overload condition is detected, and the terminal status is relayed to the controller via the E-bus. The EtherCAT Terminal indicates its signal state by means of light emitting diodes. The error LEDs indicate an overload condition.
EL3112 | EtherCAT Terminal, 2-channel analog input, current, 0…20 mA, 16 bit, differential
The EL3112 analog input terminal processes signals in the range between 0 and 20 mA. The current is digitized to a resolution of 16 bits and is transmitted, electrically isolated, to the higher-level automation device. The input channels of the EtherCAT Terminal have differential inputs and possess a common, internal ground potential. The EL3112 combines two channels in one housing. Overload condition is detected, and the terminal status is relayed to the controller via the E-bus. The EtherCAT Terminal indicates its signal state by means of light emitting diodes. The error LEDs indicate an overload condition.
EL3112-0011 | EtherCAT Terminal, 2-channel analog input, current, ±20 mA, 16 bit, differential
The EL3112-0011 analog input terminal processes signals in the range between -20 and +20 mA. The current is digitized to a resolution of 16 bits and is transmitted, electrically isolated, to the higher-level automation device. The input channels of the EtherCAT Terminal have differential inputs and possess a common, internal ground potential. The EL3112-0011 combines two channels in one housing. Overload condition is detected, and the terminal status is relayed to the controller via the E-bus. The error LEDs indicate an overload condition.

EL3114 | EtherCAT Terminal, 4-channel analog input, current, 0…20 mA, 16 bit, differential
The EL3114 analog input terminal processes signals in the range between 0 and 20 mA. The current is digitized to a resolution of 16 bits and is transmitted, electrically isolated, to the higher-level automation device. The input channels of the EtherCAT Terminal have differential inputs and possess a common, internal ground potential. Overload condition is detected, and the terminal status is relayed to the controller via the E-bus. The EtherCAT Terminal indicates its signal state by means of light emitting diodes.
EL3121 | EtherCAT Terminal, 1-channel analog input, current, 4…20 mA, 16 bit, differential
The EL3121 analog input terminal processes signals in the range between 4 and 20 mA. The current is digitized to a resolution of 16 bits and is transmitted, electrically isolated, to the higher-level automation device. The input channels of the EtherCAT Terminal have differential inputs and possess a common, internal ground potential. The EL3121 is the single-channel version and is characterized by its fine granularity and electrical isolation. An open lead or overload condition are detected. The terminal status is relayed to the controller via the E-bus. The EtherCAT Terminal indicates its signal state by means of light emitting diodes. The error LEDs indicate an overload condition and a broken wire.
EL3122 | EtherCAT Terminal, 2-channel analog input, current, 4…20 mA, 16 bit, differential
The EL3122 analog input terminal processes signals in the range between 4 and 20 mA. The current is digitized to a resolution of 16 bits and is transmitted, electrically isolated, to the higher-level automation device. The input channels of the EtherCAT Terminal have differential inputs and possess a common, internal ground potential. The EL3122 combines two channels in one housing. An open lead or overload condition are detected. The terminal status is relayed to the controller via the E-bus. The EtherCAT Terminal indicates its signal state by means of light emitting diodes. The error LEDs indicate an overload condition and a broken wire.
EL3124 | EtherCAT Terminal, 4-channel analog input, current, 4…20 mA, 16 bit, differential
The EL3124 analog input terminal handles signals in the range from 4 to 20 mA. The current is digitized to a resolution of 16 bits and is transmitted, in an electrically isolated form, to the higher-level automation device. The input channels of the EtherCAT Terminal have differential inputs and possess a common, internal ground potential. The EL3124 combines four channels in one housing. An open lead or overload condition are detected and the terminal status is relayed to the controller via the E-bus. The EtherCAT Terminal indicates its signal state by means of light emitting diodes. The error LEDs indicate an overload condition and a broken wire.
EL3124-0090 | EtherCAT Terminal, 4-channel analog input, current, 4…20 mA, 16 bit, differential, TwinSAFE SC
The EL3124-0090 analog input terminal handles signals in the range from 4 to 20 mA. The current is digitized to a resolution of 16 bits and is transmitted, in an electrically isolated form, to the higher-level automation device. The input channels of the EtherCAT Terminal have differential inputs and possess a common, internal ground potential.
EL3141 | EtherCAT Terminal, 1-channel analog input, current, 0…20 mA, 16 bit, single-ended
The job of the EL3141 analog input terminal is to supply power to measuring transducers located in the field, and to transmit analog measurement signals with electrical isolation to the automation device. The voltage for the sensors is supplied to the terminals via the power contacts. The power contacts can optionally be supplied with operating voltage in the standard way or via a supply terminal (EL9xxx) with electrical isolation. The input electronics is independent of the supply voltage of the power contacts. The 0 V power contact is the reference potential for the inputs. The EtherCAT Terminal indicates its signal state by means of light emitting diodes.
EL3142 | EtherCAT Terminal, 2-channel analog input, current, 0…20 mA, 16 bit, single-ended
The job of the EL3142 analog input terminal is to supply power to measuring transducers located in the field, and to transmit analog measurement signals with electrical isolation to the automation device. The voltage for the sensors is supplied to the terminals via the power contacts. The power contacts can optionally be supplied with operating voltage in the standard way or via a supply terminal (EL9xxx) with electrical isolation. The input electronics is independent of the supply voltage of the power contacts. The 0 V power contact is the reference potential for the inputs. The EtherCAT Terminal indicates its signal state by means of light emitting diodes.
EL3144 | EtherCAT Terminal, 4-channel analog input, current, 0…20 mA, 16 bit, single-ended
The EL3144 analog input terminal processes signals in the range between 0 and 20 mA. The current is digitized to a resolution of 16 bits and is transmitted (electrically isolated) to the higher-level automation device. The EL3144 EtherCAT Terminal features 2-wire conductors for the four single-ended inputs with a common internal ground potential. The power contacts are connected through. The signal state of the EtherCAT Terminal is indicated by light emitting diodes.
EL3151 | EtherCAT Terminal, 1-channel analog input, current, 4…20 mA, 16 bit, single-ended
The job of the EL3151 analog input terminal is to supply power to measuring transducers located in the field and to transmit analog measurement signals with electrical isolation to the automation device. The voltage for the sensors is supplied to the terminals via the power contacts. The power contacts can optionally be supplied with operating voltage in the standard way or via a supply terminal (EL9xxx) with electrical isolation. The input electronics are independent of the supply voltage of the power contacts. The reference potential for the inputs is the 0 V power contact. The EtherCAT Terminal indicates its signal state by means of light emitting diodes. The error LEDs indicate an overload condition and a broken wire.
EL3152 | EtherCAT Terminal, 2-channel analog input, current, 4…20 mA, 16 bit, single-ended
The job of the EL3152 analog input terminal is to supply power to measuring transducers located in the field and to transmit analog measurement signals with electrical isolation to the automation device. The voltage for the sensors is supplied to the terminals via the power contacts. The power contacts can optionally be supplied with operating voltage in the standard way or via a supply terminal (EL9xxx) with electrical isolation. The input electronics are independent of the supply voltage of the power contacts. The reference potential for the inputs is the 0 V power contact. The EtherCAT Terminal indicates its signal state by means of light emitting diodes. The error LEDs indicate an overload condition and a broken wire.
EL3154 | EtherCAT Terminal, 4-channel analog input, current, 4…20 mA, 16 bit, single-ended
The EL3154 analog input terminal processes signals in the range between 4 and 20 mA. The current is digitized to a resolution of 16 bits and is transmitted (electrically isolated) to the higher-level automation device. The input electronics are independent of the supply voltage of the power contacts. In the EL3154 with four inputs, the 24 V power contact is connected to the terminal in order to enable connection of 2-wire sensors without external supply. The power contacts are connected through. The signal state of the EtherCAT Terminal is indicated by light emitting diodes. The error LEDs indicate an overload condition and a broken wire.
EL3161 | EtherCAT Terminal, 1-channel analog input, voltage, 0…10 V, 16 bit, single-ended
The EL3161 analog input terminal processes signals in the range between 0 and 10 V. The voltage is digitized to a resolution of 16 bits, and is transmitted, electrically isolated, to the higher-level automation device. The input channels of the EtherCAT Terminal have the reference ground as common ground potential. The signal state of the EtherCAT Terminal is indicated by light emitting diodes.
EL3162 | EtherCAT Terminal, 2-channel analog input, voltage, 0…10 V, 16 bit, single-ended
The EL3162 analog input terminal processes signals in the range between 0 and 10 V. The voltage is digitized to a resolution of 16 bits, and is transmitted, electrically isolated, to the higher-level automation device. The input channels of the EtherCAT Terminal have the reference ground as common ground potential. The signal state of the EtherCAT Terminal is indicated by light emitting diodes.

EL3164 | EtherCAT Terminal, 4-channel analog input, voltage, 0…10 V, 16 bit, single-ended
The EL3164 analog input terminal processes signals in the range between 0 and 10 V. The voltage is digitized with a resolution of 16 bits and is transmitted (electrically isolated) to the higher-level automation device. The EL3164 EtherCAT Terminal features 2-wire conductors for the four single-ended inputs with a common internal ground potential. The power contacts are connected through. The signal state of the EtherCAT Terminal is indicated by light emitting diodes.

EL3174 | EtherCAT Terminal, 4-channel analog input, multi-function, ±10 V, ±20 mA, 16 bit
The EL3174 analog input terminal has four individually parameterizable inputs. Signals in the range from -10/0 to +10 V or -20/0/+4 to +20 mA can be processed via each channel. Physically, the voltage and current signals should be connected to different terminal points. Each channel should then be set by the controller/TwinCAT to U or I mode via CoE. The voltage inputs operate differentially; the current inputs are single-ended. All inputs are digitized with a resolution of 16 bits and transmitted, electrically isolated, to the higher-level automation device. With a technical measuring range of ±107% of the nominal range, the terminal also supports commissioning with sensor values in the limit range and diagnostics according to NAMUR NE43.
EL3174-0002 | EtherCAT Terminal, 4-channel analog input, multi-function, ±10 V, ±20 mA, 16 bit, differential, electrically isolated
The EL3174-0002 analog input terminal has four individually parameterizable inputs. Signals in the range from -10/0 to +10 V or -20/0/+4 to +20 mA can be processed via each channel. Each channel should be set by the controller to U or I mode via CoE. The input voltage or current is digitized with a resolution of 16 bits, and is transmitted, electrically isolated, to the higher-level automation device. With a technical measuring range of ±107% of the nominal range, the terminal also supports commissioning with sensor values in the limit range and diagnostics according to NAMUR NE43. The four differential inputs are electrically isolated against each other and against the fieldbus (2,500 V DC).

EL3174-0032 | EtherCAT Terminal, 4-channel analog input, multi-function, ±3 V, ±20 mA, 16 bit, differential, electrically isolated
The EL3174-0032 analog input terminal has four individually parameterizable inputs. Signals in the range from -3…+3 V or from -20/0/+4…+20 mA can be processed by each channel. Each channel should be set via the controller to U or I mode via CoE. The input voltage or current is digitized with a resolution of 16 bit, and is transmitted electrically isolated to the higher-level automation device. With a technical measuring range of 107% of the nominal range, the terminal also supports commissioning with sensor values in the limit range and an evaluation according to NAMUR NE43. The four differential inputs are electrically isolated against each other and against the fieldbus (2500 V DC).
EL3174-0090 | EtherCAT Terminal, 4-channel analog input, multi-function, ±10 V, ±20 mA, 16 bit, TwinSAFE SC
The EL3174 analog input terminal has four individually parameterizable inputs. Signals in the range from -10/0 to +10 V or -20/0/+4 to +20 mA can be processed via each channel. Physically, the voltage and current signals should be connected to different terminal points. Each channel should then be set by the controller/TwinCAT to U or I mode via CoE. The voltage inputs operate differentially; the current inputs are single-ended. All inputs are digitized with a resolution of 16 bits and transmitted, electrically isolated, to the higher-level automation device. With a technical measuring range of ±107% of the nominal range, the terminal also supports commissioning with sensor values in the limit range and diagnostics according to NAMUR NE43.
EL3182 | EtherCAT Terminal, 2-channel analog input, current, 0/4…20 mA, 16 bit, single-ended, HART
The EL3182 analog input terminal for HART-capable field devices supplies measuring transducers located in the field and transmits their analog measuring signals electrically isolated to the automation device. With a technical measuring range of 107% of the nominal range, the terminal also supports commissioning with sensor values in the limit range and the evaluation according to NAMUR NE43. The EtherCAT Terminal indicates the signal state by means of light emitting diodes. Error LEDs signal overload and wire breakage, in addition to which LEDs provide information about the state of the HART communication and signal any communication errors.
EL1258-0010 | EtherCAT Terminal, 8-channel digital input, 24 V DC, 1 µs, ground switching, multi-timestamp
The 8-channel digital input terminal EL1258-0010 acquires fast binary control signals from the process level and transmits them, in an electrically isolated form, to the controller. The EL1258-0010 is the ground switching version of the EL1258 and offers not only a higher channel density compared to the EL1252, but also higher performance due to the multi-timestamp function. Whereas the EL1252 can accept one edge change with timestamp per bus cycle, the EL1258-0010 offers the possibility to register up to 32 events with timestamps. The EL1258-0010 is synchronized with other EtherCAT devices through the distributed clocks system, so that events in the whole system can be measured with a uniform timebase.
EL2521-0024 | EtherCAT Terminal, 1-channel pulse train output, incr. enc. simulation, 24 V DC, 1 A
The EL2521-xxxx output terminals change the frequency of a binary signal and output it (electrically isolated from the E-bus). The frequency is preset by a 16 bit value from the automation device. The signal state of the EtherCAT Terminal is indicated by light emitting diodes. The LEDs are clocked with the outputs and each displays an active output.
EP7402-0167 | EtherCAT Box, 2-channel motion interface, BLDC motor, 48 V DC, 3.5 A, M8
The EP7402-0167 EtherCAT Box offers two outputs with integrated MDR controller for the direct connection of 48 V DC conveyor roller motors or other BLDC motors with max. 3.5 A. Eight additional digital inputs/outputs enable connection of e.g. photoelectric switches and communication between the box modules in operation without PLC.
EL2521-0025 | EtherCAT Terminal, 1-channel pulse train output, incr. enc. simulation, 24 V DC, 1 A, ground switching
The EL2521-xxxx output terminals change the frequency of a binary signal and output it (electrically isolated from the E-bus). The frequency is preset by a 16 bit value from the automation device. The signal state of the EtherCAT Terminal is indicated by light emitting diodes. The LEDs are clocked with the outputs and each displays an active output.
EL2521-0124 | EtherCAT Terminal, 1-channel pulse train output, incr. enc. simulation, 24 V DC, 1 A, with capture/compare input/output
The EL2521-xxxx output terminals change the frequency of a binary signal and output it (electrically isolated from the E-bus). The frequency is preset by a 16 bit value from the automation device. The signal state of the EtherCAT Terminal is indicated by light emitting diodes. The LEDs are clocked with the outputs and each displays an active output.
EL3142-0010 | EtherCAT Terminal, 2-channel analog input, current, ±10 mA, 16 bit, single-ended
The job of the EL3142-0010 analog input terminal is to supply power to measuring transducers located in the field, and to transmit analog measurement signals with electrical isolation to the automation device. The voltage for the sensors is supplied to the terminals via the power contacts. The power contacts can optionally be supplied with operating voltage in the standard way or via a supply terminal (EL9xxx) with electrical isolation. The input electronics is independent of the supply voltage of the power contacts. The 0 V power contact is the reference potential for the inputs. The EtherCAT Terminal indicates its signal state by means of light emitting diodes.
EL2596-0030 | EtherCAT Terminal, 1-channel LED output, 0…24 V DC, 3 A, externally calibrated
The EL2596-0030 LED strobe control terminal contains a flexible power supply unit that supplies the LED with the required current and voltage. Applications from continuous light to short light pulses in the kHz range are thus possible. Each individual flash can be triggered in a controlled manner by the control system via the distributed clocks/timestamp function. The EL2596-0030 has a trigger output for triggering cameras and high-quality, fast current and voltage control, so that line scan cameras, for example, also benefit from constant illumination. Extensive real-time diagnostics, e.g. for input current/voltage and output current/voltage allow detailed monitoring of the LED light intensity. Thus, overdrive applications with short high-current pulses through the LED are possible. If a specifiable load corridor is exited, e.g., due to load errors, the EL2596-0030 switches off to protect the LED (resettable).