TwinCAT MC3 – Motion Control der nächsten Generation
Mit TwinCAT MC3 steht eine neue Motion-Control-Generation zur Verfügung, die sich u. a. durch die konsequente Multicore- und Multitask-Unterstützung auszeichnet. Dabei setzt sie auf einer modularen Architektur auf, sodass sich auch bereits mit der bewährten Lösung TwinCAT NC2 realisierte Achsen nahtlos einbinden sowie zukünftige Motion-Anforderungen einfach integrieren lassen.
Schon seit der Vorstellung von TwinCAT im Jahr 1996 ist Motion Control ein wesentlicher Bestandteil dieser Automatisierungsplattform. Nicht zuletzt der langjährige Erfolg dieser TwinCAT NC2 genannten Lösung bestätigt dabei das gut durchdachte und praxisgerechte damalige Konzept. So werden Achsen in Achsobjekte abstrahiert, sodass sich die Achsen simulieren und unabhängig von der Hardware programmieren lassen. Zudem steht ausgehend von einfachen Einzelachsbewegungen über komplexe Achskopplungen bis hin zu darauf aufbauenden Bahnplanungen ein breites Spektrum an Funktionalitäten für jeden Anwendungsfall zur Verfügung.

Vollständige Systemintegration und moderne Architektur
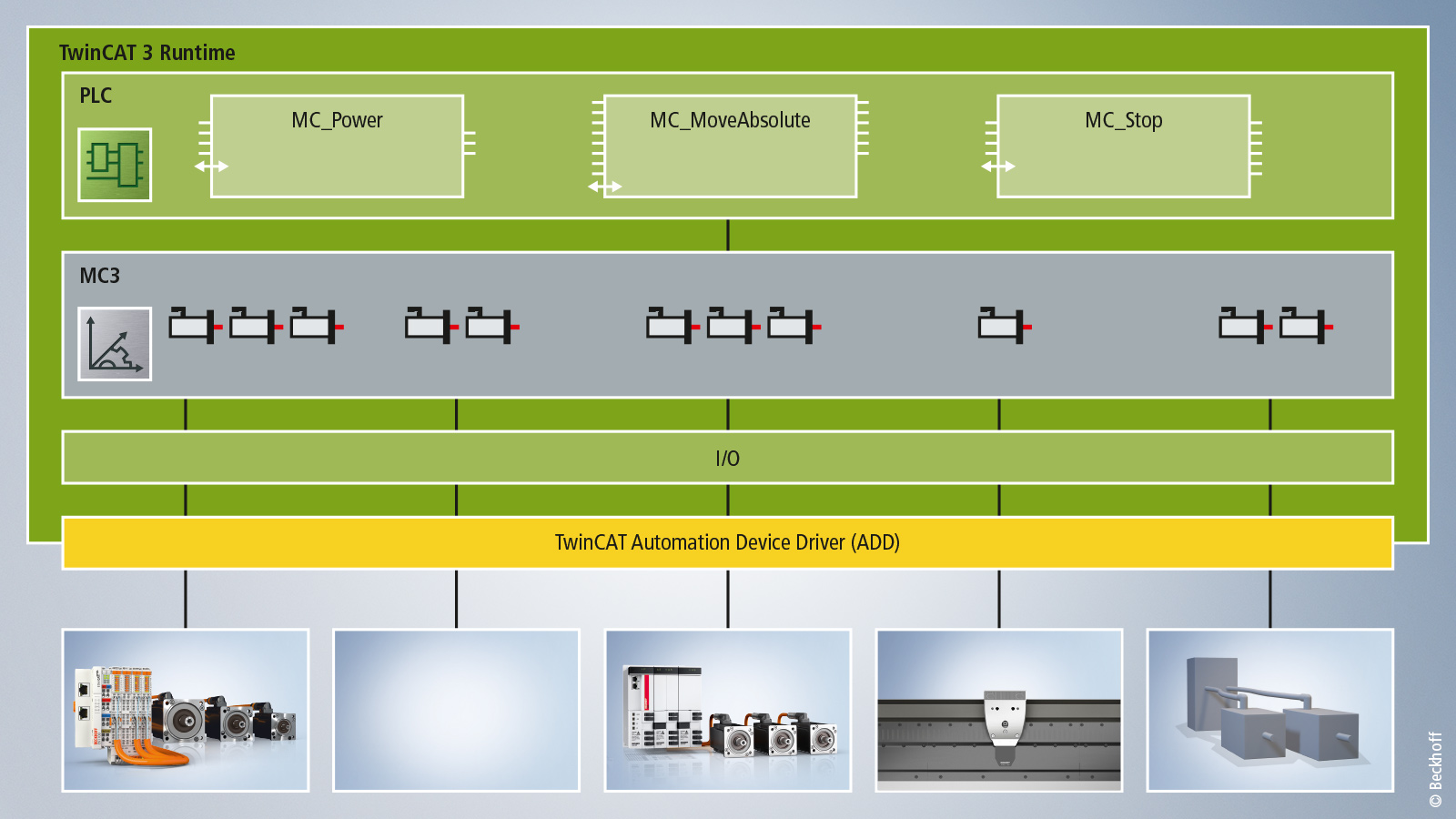
Die Erfolgsmerkmale der bisherigen Motion-Control-Lösung von Beckhoff bleiben auch mit TwinCAT MC3 erhalten. So ist TwinCAT MC3 ebenfalls vollständig in das TwinCAT-System integriert und ermöglicht eine Abstraktion von Achsen. Ergänzend bringt TwinCAT MC3 durch eine neue und modulare Architektur zahlreiche zusätzliche Vorteile mit sich. Dazu zählen insbesondere die umfassende Multicore- und Multitask-Unterstützung – mit der Möglichkeit, dass synchronisierte Bewegungen über alle verwendeten Prozessorkerne hinweg erfolgen können. Außerdem entfällt die bisherige Beschränkung der Achsanzahl.
Die nahtlose Integration von TwinCAT MC3 in das TwinCAT-System bedeutet, dass die Motion-Control-Lösung sich nicht nur parallel zu den anderen TwinCAT-Funktionen auf einem System betreiben lässt, sondern auch mit den anderen TwinCAT-Funktionen interagieren kann. Beispiele hierfür sind:
- TwinCAT MC3 kann parallel zur bisherigen Motion-Control-Lösung NC2 betrieben werden. Zudem sind MC3-Achsen auch auf bestehende NC2-Achsen koppelbar. Dies ermöglicht es, neue Maschinenkomponenten mit TwinCAT MC3 umzusetzen, ohne die bestehenden, NC2 verwendenden Maschinenkomponenten anpassen zu müssen.
- TwinCAT Drive Manager unterstützt bei der Inbetriebnahme von Beckhoff Antriebslösungen und kann, wie für NC2 gewohnt, auch MC3-Konfigurationen und MC3-Achsen automatisch mit Standardparametern erstellen.
- Mit TwinCAT Scope steht ein leistungsfähiges Diagnosetool zur Verfügung, mit dem sich Bewegungen und Dynamiken aufzeichnen und anschließend mithilfe verschiedener Werkzeuge manuell analysiert lassen.
Skalierbare Performance durch Multicore- und Multitask-Support
Mit TwinCAT MC3 kann durch die konsequente Multicore- und Multitask-Unterstützung die CPU-Performance des Steuerungsrechners optimiert ausgenutzt werden. Demgemäß skaliert sich die mögliche Achsanzahl und Komplexität der Anwendung entsprechend dem gewählten TwinCAT Plattform Level:
- Multicore-Unterstützung bedeutet in diesem Zusammenhang, dass sich TwinCAT MC3 bedarfsgerecht auf mehrere CPU-Kerne verteilen lässt. Dabei sind synchronisierte Bewegungen über alle verwendeten CPU-Kerne möglich.
- Multitask-Unterstützung bedeutet: Auf einem CPU-Kern können Achsen mit unterschiedlichen Zykluszeiten betrieben werden, genau passend zu den Geschwindigkeiten und Aufgaben der jeweiligen Achsen. So ist eine optimierte Ausnutzung eines CPU-Kerns möglich, da die „schnellste“ Achse nicht zwangsweise den Takt für alle Achsen vorgibt. Auf diese Weise können die Achsen eines Transportbands mit Delta-Picker mit 1 ms Zykluszeit betrieben werden, um ein schnelles Aufnehmen der Werkstücke sicherzustellen, während die Achsen zur Breitenverstellung des Transportbands mit 4 ms Zykluszeit auf demselben CPU-Kern betrieben werden.
Vorteile der Hardwareunabhängigkeit
Wie bei der bisherigen Motion-Control-Lösung werden bei TwinCAT MC3 die Achsen in Achsobjekte abstrahiert, welche die Hardware und die Programmierung voneinander trennen. Auf diese Weise entsteht eine Hardwareunabhängigkeit, deren Vorteile sich in folgenden Features zeigen:
- Achsen können simuliert werden, wobei auch eine Mischung aus realen und simulierten Achsen in einem Projekt möglich ist. Die Umschaltung zwischen realer und simulierter Achse kann in der Konfiguration mit einem Mausklick sowohl für eine einzelne Achse als auch für eine Gruppe von Achsen erfolgen. So ist es möglich, die Achsen ohne Verbindung zur Hardware zu programmieren. Hierdurch reduziert sich die Inbetriebnahmezeit an der realen Maschine.
- TwinCAT ist eine offene Steuerungsplattform, die neben dem hochleistungsfähigen Kommunikationssystem EtherCAT auch alle weiteren gängigen Feldbussysteme unterstützt.
- Unterschiedlichste Antriebssysteme, wie z. B. Servo-, Schritt- und DC-Motoren sowie das Produkttransportsystem XTS, werden gleichermaßen in Achsobjekte abstrahiert und lassen sich somit einheitlich programmieren. Zur Programmierung steht die TwinCAT-Bibliothek Tc3_Mc3 zur Verfügung, mit den bereits aus der NC2 bekannten PLCopen-konformen Funktionsbausteinen.
- Mit TwinCAT MC3 werden nun auch Hydraulik-Achsen unterstützt und vollständig integriert. Die allgemeine Programmierung erfolgt hierbei über die gleichen PLCopen-konformen Funktionsbausteine, wie sie für elektrische Achsen genutzt werden. Für spezielle Fluid-Power-Funktionalitäten gibt es zudem eine Bibliothek mit ergänzenden Funktionsbausteinen.
Modulare Architektur und hohe Funktionalität
TwinCAT MC3 basiert auf einer modularen Architektur, welche eine zukunftssichere Basis darstellt. Multicore- und Multitask-Unterstützung sind bereits genannte Features, die auf dieser neuen Architektur aufbauen. Darüber hinaus wird hiermit zukünftig die Realisierung neuer Eigenschaften erleichtert bzw. ermöglicht. Ein Beispiel ist der Austausch von Profilgeneratoren, Treibern oder Filtern durch kundenspezifische Varianten. Über die von NC2 bekannten und bewährten Funktionalitäten wird TwinCAT MC3 ebenfalls verfügen. Das erste Release der Motion-Control-Lösung der nächsten Generation startet mit PTP (Point-to-Point)-Bewegungen und Kopplungen. Wobei Letztere bereits ein breites Spektrum – von einfachen linearen Achskopplungen bis hin zu nichtlinearen Kopplungen in der Bewegung – abdecken werden.
Weitere Informationen





