Oceaneering Mobile Robotics 的 UniMoverTM O 600 系統採用強大、節省空間的自動化技術,是工業與醫療設施的理想選擇
內部物流、航空航天、娛樂、海上石油及天然氣、再生能源與科學研究有什麼共同點?首先,這些行業的應用均受益於自動機器人技術。其次,Oceaneering 在其所屬產業均已開創創新自動化技術解決方案。
Oceaneering Mobile Robotics (OMR) 技術經理 Gareth Jones 博士表示,OMR 將公司在移動機器人技術方面的專業知識應用於物料搬運應用。該集團在製造、醫院、分銷與汽車領域擁有豐富系統部署歷史,且向全球部分最負盛名的品牌提供服務。部署於北美、歐洲、澳洲與亞洲的 OMR 移動機器人數量已超過 1,700 台,總行駛里程達 3,000 萬英哩。OMR 為保持其驚人成長趨勢,聚焦建立標準產品線,以便提高一系列新應用的採用率。

Jones 博士解釋:「與許多移動機器人供應商一樣,我們最初著重定制解決方案。但所有產業的需求都在成長,我們希望增加移動機器人的使用率。現在,我們不再每年僅生產數十台訂製機器人,而是聚焦生產數百種標準化產品,同時制定強有力的發布路線圖,最近一次是 UniMover™ O 600。」
成功之道
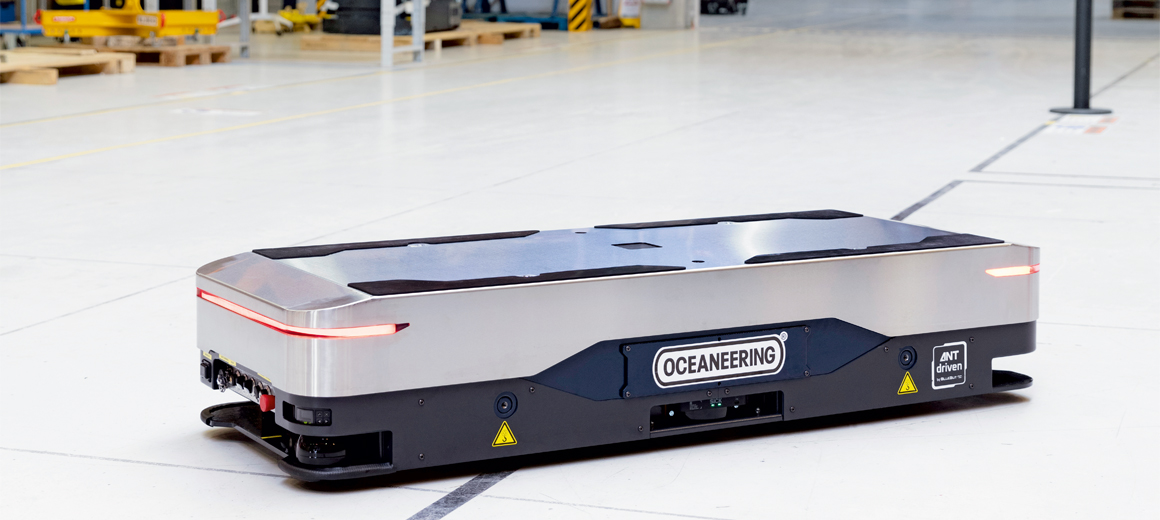
UniMover™ O 600 是一款底盤移動機器人,適用空間條件極為狹小的輕工業與醫療保健應用。其速度可達到每秒 1.8 公尺,且可處理最高 600 公斤 (1,322 磅) 重物。
對於工業與醫院應用,UniMover™ O 600 是典型高效率且具成本效益的運輸解決方案,可用於取放貨物或物料,例如原物料、餐車或衣物。這款機器人可全向運動,運用自然特徵與安全雷射雷達進行導航,進而識別繁忙的非結構化環境,並在其中安全移動。為達成這一目標,UniMover™ O 600 可採用自動移動機器人 (AMR) 模式或 AGV 模式運作,前者可在限制速度的同時提供最佳避障效果,後者則可提高速度,但在偵測到物體時基本上會停止,而非繞道而行。
除功能與可靠性之外,OMR 工程師還需將所有控制硬體盡可能安裝到最小空間內,維持機器人尺寸為精巧的 1,670 x 600 x 335 公釐 (65.8 x 23.6 x 13.2 英寸)。他們還必須開發可擴充製造流程,以便支援標準解決方案的批量生產。Jones 博士表示,過去他們會使用 Linux 來針對機器人與製造設備進行編程,技術人員則會透過 Linux 行命令來測試產品。儘管效率不高,但團隊無法完全放棄多年發展成果。

OMR 於 2021 年開始根據功能性評估自動化供應商,但對於國際團隊而言,在全球範圍內進行協作並獲得支援的能力同樣至關重要。在短短六個月內,倍福因其在功能與可用性方面獲得高分而入選。
替代操作系統提升了機器人系統的彈性
每台機器人均依賴倍福的 C6017 超小型工業用 PC 來提供控制邏輯與其他功能。儘管 Windows 長期以來一直是倍福機器控制器的預設選項,但 UniMover™ 的 C6017 採用的是 TwinCAT/BSD 替代作業系統 (OS)。TwinCAT/BSD 提供現代 UNIX 作業系統所帶來的效能與安全性。因此,其功能與現今的 PLC 一樣,採用即時作業系統 (RTOS) 而非專有韌體。
倍福全球內部物流經理 Doug Schuchart 表示,TwinCAT/BSD 與許多其他物料處理專家共同為 OMR 帶來了改變。Schuchart 表示:「有別於傳統硬體 PLC 的『黑盒子』方法,TwinCAT/BSD 運用倍福數十年的精密控制開發成果。這款強大作業系統也保持開放,可讓機器執行第三方軟體,例如 Linux 發行版,且可在我們的新 Hypervisor 啟用虛擬機器。許多應用均受益於在同一硬體 (無論是在原生作業系統,還是在虛擬機器的其他作業系統) 與 PLC 一起執行第三方軟體。然而,AGV 可透過採用這種架構獲得獨特優勢。」
TwinCAT 3 自動化軟體仍是 TwinCAT/BSD 應用的端到端工程與執行階段平台。OMR 工程師能夠運用各種語言進行編程,包括國際標準化的 IEC 61131-3 及其物件導向的擴充功能,以及整合 Visual Studio™ 的功能區塊與電腦科學標準。Jones 博士說:「我們的團隊對 TwinCAT 非常滿意,因其可構建使用者介面,例如在生產線執行功能檢查。相較於使用 Linux 的命令行,這更加直觀。此外,其還可將它們連接到所有周邊設備的資料,進而提高可視性。」

EtherCAT 確保移動機器人技術的駕駛員安全性
EtherCAT 工業乙太網路系統提供即時通訊,且可自由選擇所有開放通訊協定的拓撲與通訊。OMR 使用 EL6581 DMX 主控制器來控制機器人的安全燈,而 EL6751 CANopen 主控制器則簡化與第三方導航控制器的通訊。這些模組還提供標準 I/O 卡的緊湊、模組化外形。
安全對於任何自動機器人而言均至關重要,TwinSAFE 技術依賴另一國際開放標準 Fail Safe over EtherCAT (FSoE) 來落實高水準安全性。FsoE 利用「黑色通道」方法,透過標準 EtherCAT 網路傳送安全資料。這可降低佈線要求,同時為數位與類比安全提供必要冗餘除標準安全邏輯外,TwinCAT 還能使用 Safety C 來實施 TwinSAFE 應用程式,進而提升安全能力。
UniMover™ 運用倍福的多個 TwinSAFE 終端機。具體而言,EL5001-0090 單通道 SSI 編碼器介面簡化了速度與位置監控。Jones 博士說:「當採用全向驅動時,我們必須控制兩個驅動馬達與兩個轉向馬達,因此我們需要知道轉向角位置,以及驅動馬達本身的實際速度。TwinSAFE 的增強功能也讓我們在未來擁有更多選擇,這將讓我們能夠製造更精密的移動機器人。」
緊湊型控制讓移動機器人全速前進
Jones 博士說,UniMover™ O 600 的可行性取決於尺寸與可操作性,而倍福技術的標準化在這兩方面均有所助益。相較於 OMR 之前的機器控制器,C6017 的緊湊外形減少 56% 的空間需求。C6017 與 EtherCAT 終端機不僅節省空間也節省時間。在過去,技術人員必須在機器周圍散佈組件。現在,他們可提前製作標準控制套件,然後將其安裝在 UniMover™的單一機櫃,加快調試時間。
新自動化技術領導者的全球銷售網絡簡化了與 OMR 團隊的協作,Schuchart 解釋說:「UniMover™ 專案是我們與客戶進行國際合作的完美範例。我們可直接與各方合作:Oceaneering 在馬里蘭州與佛羅里達州的工程師、路易斯安那州的全球採購團隊、荷蘭的 Gareth 團隊,以及全球行業管理層,這促進了所有團隊之間的密切溝通。」
OMR 計畫透過切換到 EJ 系列 EtherCAT I/O 模組來進一步最佳化生產,該模組安裝在特定應用的 PCB 板並使用標準連接器。EJ 端子的尺寸約為標準 I/O 片的 50%,透過降低傳統離散佈線的勞動時間,EJ 端子非常適合批量生產,這有助提高大型移動機器人機隊產量。此解決方案讓工程師能夠運用倍福的商業現成 (COTS) I/O,以高度簡化的方式建立自己的連接板。
Oceaneering Mobile Robotics 以 UniMover™ O 600 專案的成功為基礎,運用倍福強大、節省空間的自動化技術,繼續向前推進建立新機器人系統,例如其 MaxMover™ CB D 2000 平衡堆高機。MaxMoverTM 取代了傳統堆高機,但即使滿載 (負戴超過 4 噸) 仍可像 UniMover™ 一樣,以 AGV 或 AMR 模式運作。」Jones 說道。Jones說:「設計 UniMover™ 是具有挑戰性的專案。憑藉倍福帶來的優勢,我們希望能在更多標準移動機器人產品線應用相同架構。」