
TF5410 | TwinCAT 3 Motion Collision Avoidance

TF5410 | TwinCAT 3 Motion Collision Avoidance

TwinCAT 3 Motion Collision Avoidance 可选软件包能够在使用 TwinCAT 3 NC PTP 运行多个线性移动和/或相互跟随移动的轴时主动规避碰撞。底层算法可确保维护与前一个轴之间的最小距离。通过这种方式,TwinCAT 3 Motion Collision Avoidance 能够有效预防多台电机发生碰撞,例如这些电机使用相同的轨道。除主动规避碰撞外,TF5410 还可用于允许多个轴以可控方式成组运行,例如当通过 XTS 磁驱柔性输送系统执行线性运动时。
PLC 运动指令的编程基于具有附加输入 “gap” 的标准 PTP 运动功能库。例如,如果使用 TC3 运动碰撞规避,可赋予所有轴相同的目标位置。该算法可确保仅有第 1 个轴能够移至那个位置。其余的轴会自动排队,同时维护它们的最小距离。这意味着为部署产品能够在其中累积的动态缓冲器,不需要其它编程工作。
产品状态:
正常供应
产品信息
| 技术数据 | TF5410 |
|---|---|
| 要求 | TC1250 |
| 操作系统 | Windows 10, TwinCAT/BSD |
| CPU 结构 | x64 |
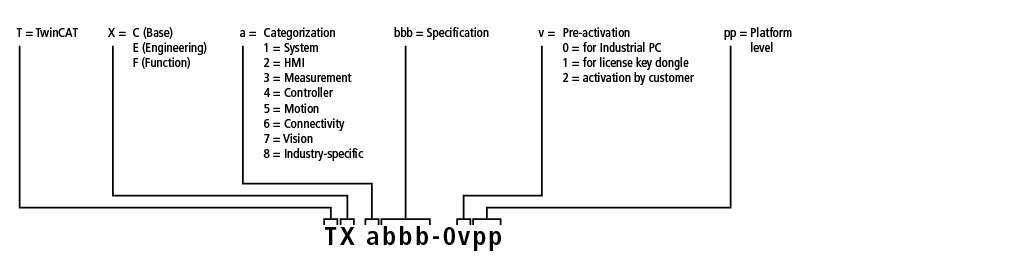
| 订购信息 | |
|---|---|
| TF5410-0v40 | TwinCAT 3 Motion Collision Avoidance,平台等级 40(普通型) |
| TF5410-0v50 | TwinCAT 3 Motion Collision Avoidance,平台等级 50(普通增强型) |
| TF5410-0v60 | TwinCAT 3 Motion Collision Avoidance,平台等级 60(中等性能型) |
| TF5410-0v70 | TwinCAT 3 Motion Collision Avoidance,平台等级 70(高性能型) |
| TF5410-0v80 | TwinCAT 3 Motion Collision Avoidance,平台等级 80(极高性能型) |
| TF5410-0v81 | TwinCAT 3 Motion Collision Avoidance,平台等级 81(极高性能型) |
| TF5410-0v82 | TwinCAT 3 Motion Collision Avoidance,平台等级 82(极高性能型) |
| TF5410-0v83 | TwinCAT 3 Motion Collision Avoidance,平台等级 83(极高性能型) |
| TF5410-0v84 | TwinCAT 3 Motion Collision Avoidance,平台等级 84(极高性能型) |
| TF5410-0v90 | TwinCAT 3 Motion Collision Avoidance,平台等级 90(其它) |
| TF5410-0v91 | TwinCAT 3 Motion Collision Avoidance,平台等级 91(其它,5…8 个处理器核) |
| TF5410-0v92 | TwinCAT 3 Motion Collision Avoidance,平台等级 92(其它,9…16 个处理器核) |
| TF5410-0v93 | TwinCAT 3 Motion Collision Avoidance,平台等级 93(其它,17…32 个处理器核) |
| TF5410-0v94 | TwinCAT 3 Motion Collision Avoidance,平台等级 94(其它,33…64 个处理器核) |
对于平台等级 90-94,我们推荐使用 TwinCAT 3 授权加密狗。
正在加载页面内容…请稍候
正在加载页面内容…请稍候
正在加载页面内容…请稍候
正在加载页面内容…请稍候
© Beckhoff Automation 2025 - 使用条款