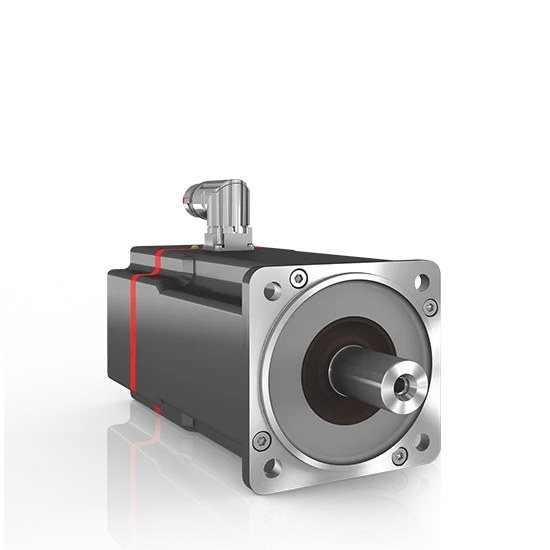
Compact Drive Technology: AM81xx and AM31xx motor series
In combination with the Motion Control solutions offered by the TwinCAT automation software, Beckhoff Drive Technology represents an advanced and complete drive system. PC-based control technology from Beckhoff is ideally suited for single and multiple axis positioning tasks with highly dynamic requirements.
More about this video

EtherCAT Box
EtherCAT high-performance directly in the field: Beckhoff offers an I/O system in IP67 with the EtherCAT Box modules.

EtherCAT Terminals
The EtherCAT Terminal system provides a comprehensive range of products for all signals in the world of automation.

I/O
Beckhoff liefert ein umfangreiches Programm an Feldbuskomponenten für alle gängigen I/Os und Feldbussysteme.
Motion
Our innovative drive technologies give you almost unlimited capabilities when it comes to realizing your application.
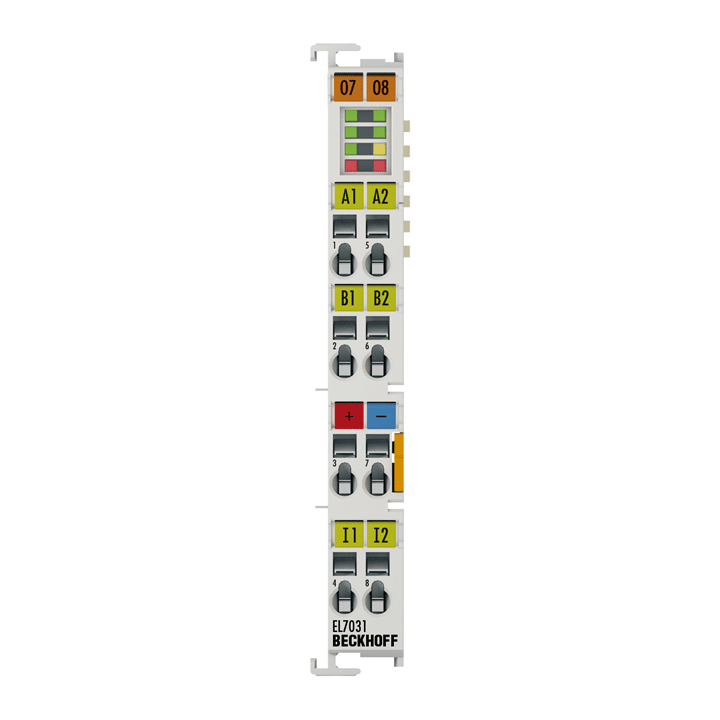
EL7031 | EtherCAT Terminal, 1-channel motion interface, stepper motor, 24 V DC, 1.5 A
The EL7031 EtherCAT Terminal is intended for the direct connection of stepper Motors in the low power range up to 1.5 A. The compact stepper motor output stage is accommodated in the EtherCAT Terminal together with two digital inputs for limit switches. Through parameterization, the EL7031 can be adjusted to the motor and the application requirements. 64-fold micro-stepping ensures particularly quiet and precise motor operation.
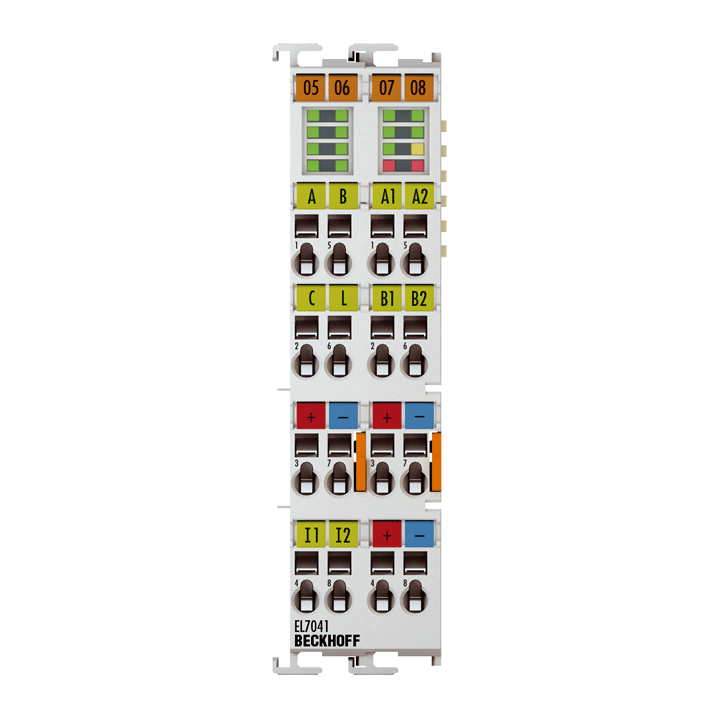
EL7041 | EtherCAT Terminal, 1-channel motion interface, stepper motor, 48 V DC, 5 A, with incremental encoder
The EL7041 EtherCAT Terminal is intended for the direct connection of stepper Motors in the mid power range up to 5 A an a voltage range from 8…48 V. The compact stepper motor output stage is accommodated in the EtherCAT Terminal together with two digital inputs for limit switches an one encoder interface. Through parameterization, the EL7041 can be adjusted to the motor and the application requirements. 64-fold micro-stepping ensures particularly quiet and precise motor operation.
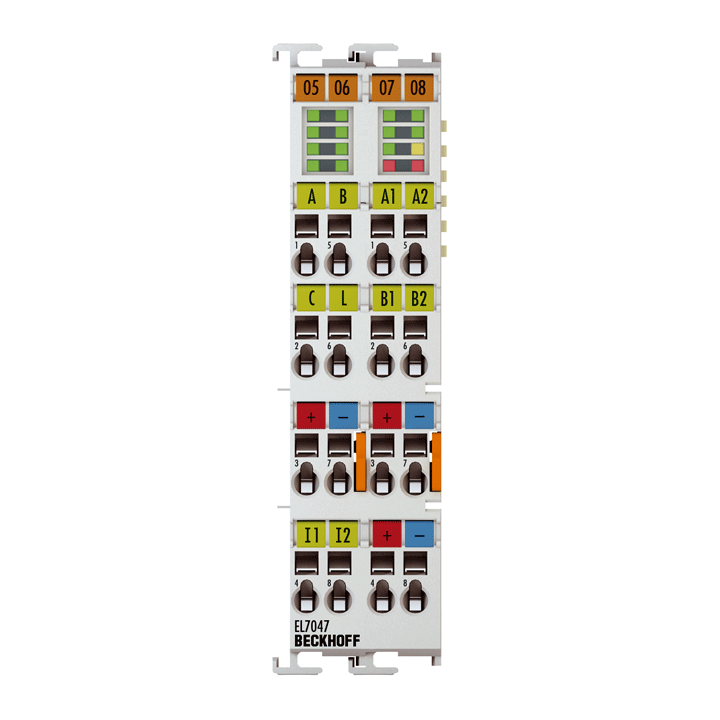
EL7047 | EtherCAT Terminal, 1-channel motion interface, stepper motor, 48 V DC, 5 A, vector control, with incremental encoder
The EL7047 EtherCAT Terminal is intended for the direct connection of stepper Motors in the mid power range up to 5 A an a voltage range from 8…48 V. The compact stepper motor output stage is accommodated in the EtherCAT Terminal together with two digital inputs for limit switches. Through parameterization, the EL7047 can be adjusted to the motor and the application requirements. 64-fold micro-stepping ensures particularly quiet and precise motor operation.

EP7041-0002 | EtherCAT Box, 1-channel motion interface, stepper motor, 48 V DC, 5 A, M12, with incremental encoder
The EP7041 EtherCAT Box is intended for the direct connection of different stepper motors. The PWM output stages for two motor coils with compact design are located in the module together with two inputs for limit switches and cover a wide voltage and current range. The EP7041 can be adjusted to the motor and the application by changing just a few parameters. 64-fold micro-stepping ensures particularly quiet and precise motor operation. Connection of an incremental encoder enables a simple servo axis to be realized. Two digital inputs and a digital 0.5 A output enable connection of end switches and a motor brake.

EP7041-1002 | EtherCAT Box, 1-channel motion interface, stepper motor, 48 V DC, 1.5 A, M12, with incremental encoder
The EP7041-1002 EtherCAT Box is intended for the direct connection of different Stepper Motors. The PWM output stages for two motor coils with compact design are located in the module together with two inputs for limit switches and cover a wide voltage and current range. The EP7041-1002 can be adjusted to the motor and the application by changing just a few parameters. 64-fold micro-stepping ensures particularly quiet and precise motor operation. Connection of an incremental encoder enables a simple servo axis to be realized. Two digital inputs and a digital 0.5 A output enable connection of end switches and a motor brake.
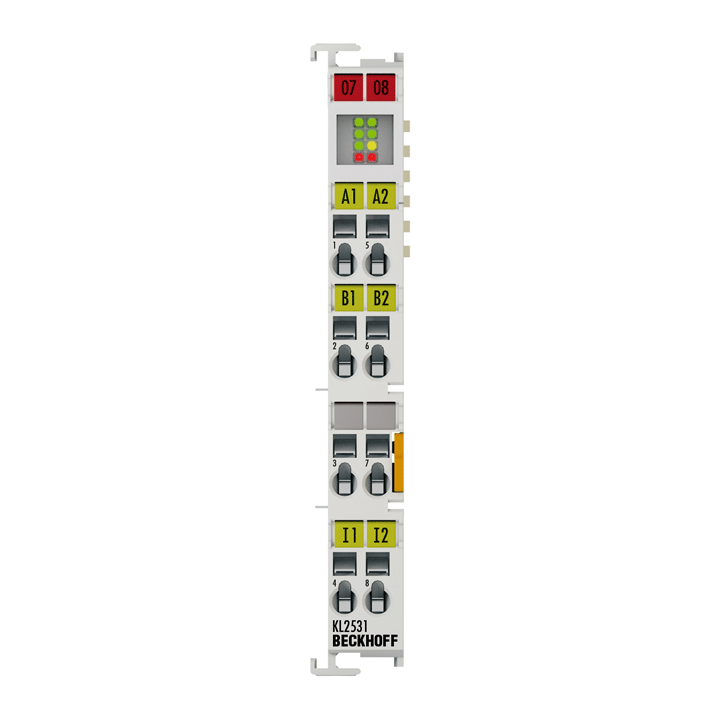
KL2531 | Bus Terminal, 1-channel motion interface, stepper motor, 24 V DC, 1.5 A
The KL2531 Bus Terminal is intended for the direct connection of different small stepper motors. The slimline PWM output stages for two motor coils are located in the Bus Terminal together with two inputs for limit switches. The KL2531 can be adjusted to the motor and the application by changing just a few parameters. 64-fold micro-stepping ensures particularly quiet and precise motor operation. In many applications, integrated zero-speed monitoring makes an encoder system or limit switch unnecessary.
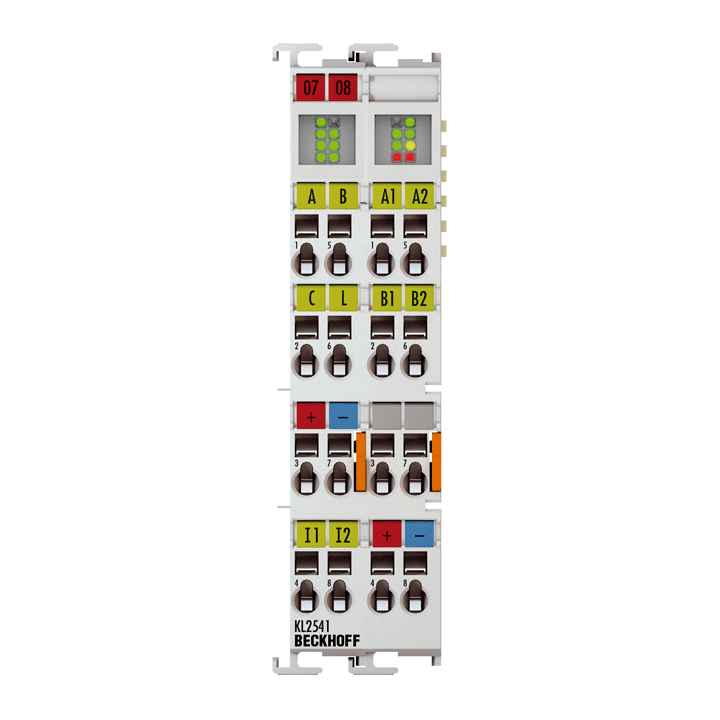
KL2541 | Bus Terminal, 1-channel motion interface, stepper motor, 48 V DC, 5 A, with incremental encoder
The KL2541 Bus Terminal is intended for stepper motors with medium performance range. The PWM output stages cover a wide range of voltages and currents. Together with two inputs for limit switches, they are located in the Bus Terminal. The stepper motor terminal KL2541 can be adjusted to the motor and the application by changing just a few parameters. 64-fold micro stepping ensures particularly quiet and precise motor operation. Together with a stepper motor, the KL2541 represents an inexpensive small servo axis.
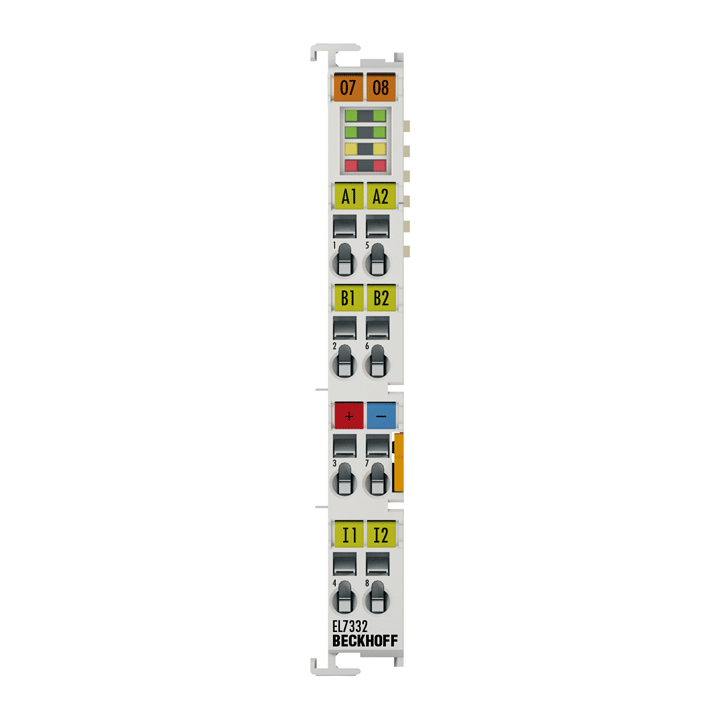
EL7332 | EtherCAT Terminal, 2-channel motion interface, DC motor, 24 V DC, 1 A
The EL7332 EtherCAT Terminal enables direct operation of two DC motors. It is galvanically isolated from the E-bus. The speed is preset by a 16 bit value from the automation unit. The output stage is protected against overload and short-circuit, the common thermal overload warning applies to both output stages together. The EtherCAT Terminal has two channels that indicate their signal state via light emitting diodes. The LEDs enable quick local diagnosis.
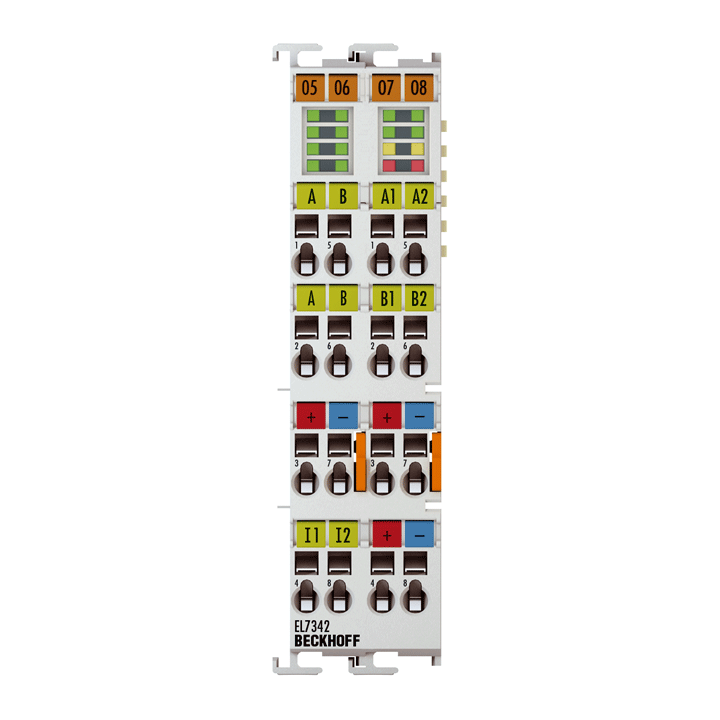
EL7342 | EtherCAT Terminal, 2-channel motion interface, DC motor, 48 V DC, 3.5 A
The EL7342 EtherCAT Terminal enables direct operation of two DC motors. It is galvanically isolated from the E-bus. The speed or position is specified by the automation device via a 16 bit value. Connection of an incremental encoder enables a simple servo axis to be realized. The output stage is protected against overload and short-circuit, the common thermal overload warning applies to both output stages together. The EtherCAT Terminal has two channels that indicate their signal state via light emitting diodes. The LEDs enable quick local diagnosis.
KL2284 | Bus Terminal, 4-channel digital output, reverse switching, 24 V DC, 2 A
The KL2284 output terminal switches loads in selectable polarity. This means that DC motors can be used in both directions of rotation. A polarity is switched with two output bits per channel. An interlock prevents simultaneous switching of both directions. Advanced power semiconductors enable safe and wear-free switching with minimum dimensions. The high starting and short-circuit currents of the KL2284 are comparable with a robust relay. The number of switching cycles is almost unlimited.
KL2532 | Bus Terminal, 2-channel motion interface, DC motor, 24 V DC, 1 A
The KL2532 Bus Terminal enables direct operation of two DC motors. It is galvanically isolated from the K-bus. The speed is preset by a 16 bit value from the automation unit. The output stage is protected against overload and short-circuit. The Bus Terminal contains two channels that indicate their signal state by means of light emitting diodes. The LEDs enable quick local diagnosis.
KL2552 | Bus Terminal, 2-channel motion interface, DC motor, 48 V DC, 5 A
The KL2552 Bus Terminal enables direct operation of two DC motors. It is galvanically isolated from the K-bus. The speed is specified by the automation device via a 16 bit value. Connection of an incremental encoder enables a simple servo axis to be realized. Typical motor parameters can be set in order to avoid critical conditions of the DC motor. The load can be protected by limiting the maximum values for speed, torque and acceleration. The output stage is protected against overload and short-circuit. The Bus Terminal contains two channels that indicate their signal state by means of light emitting diodes. The LEDs enable quick local diagnostics.
KL2791 | Bus Terminal, 1-channel motion interface, AC motor, 230 V AC, 0.9 A
The KL2791-xxxx AC motor speed controller is intended for direct connection of different low-power single-phase AC motors. The KL2791 enables speed reduction of typical motors such as capacitor motors, universal motors and shaded-pole motors. The required output power is specified via the process data. The output setting matches respective output value through targeted on and off switching at optimized times. This technique is particularly suitable for drives with quadratic load characteristic such as fans and pumps.
KL2284 | Bus Terminal, 4-channel digital output, reverse switching, 24 V DC, 2 A
The KL2284 output terminal switches loads in selectable polarity. This means that DC motors can be used in both directions of rotation. A polarity is switched with two output bits per channel. An interlock prevents simultaneous switching of both directions. Advanced power semiconductors enable safe and wear-free switching with minimum dimensions. The high starting and short-circuit currents of the KL2284 are comparable with a robust relay. The number of switching cycles is almost unlimited.

TwinCAT
The TwinCAT software system turns almost any PC-based system into a real-time control with multiple PLC, NC, CNC and/or robotics runtime systems.

EP7041-2002 | EtherCAT Box, 1-channel motion interface, stepper motor, 48 V DC, 5 A, M12, with incremental encoder
The EP7041-2002 EtherCAT Box is intended for the direct connection of different stepper motors. The PWM output stages for two motor coils with compact design are located in the module together with two inputs for limit switches and cover a wide voltage and current range. The EP7041-2002 can be adjusted to the motor and the application by changing just a few parameters. 64-fold micro-stepping ensures particularly quiet and precise motor operation. Connection of an incremental encoder enables a simple servo axis to be realized. Two digital inputs and a digital 0.5 A output enable connection of end switches and a motor brake. The external motor is fed via an integrated plug.

EP7041-3002 | EtherCAT Box, 1-channel motion interface, stepper motor, 48 V DC, 5 A, for high-speed applications, M12, with incremental encoder
The EP7041-3002 EtherCAT Box is intended for the direct connection of different stepper motors. The PWM output stages for two motor coils cover a wide voltage and current range. The EP7041-3002 can be adjusted to the motor and the application by changing just a few parameters. 256-fold micro-stepping ensures particularly quiet and precise motor operation. Connection of an incremental encoder enables a simple servo axis to be realized. Two digital inputs and a digital 0.5 A output enable connection of end switches and a motor brake.

EP7041-3102 | EtherCAT Box, 1-channel motion interface, stepper motor, 48 V DC, 5 A, for high-speed applications, M12, with incremental encoder
The EP7041-3102 EtherCAT Box is intended for the direct connection of different stepper motors. The PWM output stages for two motor coils cover a wide voltage and current range. The EP7041-3102 can be adjusted to the motor and the application by changing just a few parameters. 256-fold micro-stepping ensures particularly quiet and precise motor operation. Connection of an incremental encoder enables a simple servo axis to be realized. Two digital inputs and a digital 0.5 A output enable connection of end switches and a motor brake.

EP7211-0034 | EtherCAT Box, 1-channel motion interface, servomotor, 48 V DC, 4.5 A, OCT, suitable for STO applications
The EP7211-0034 servomotor EtherCAT Box with integrated One Cable Technology (OCT) offers high servo performance in a very compact design for AM8100 series motors with up to 4.5 A (Irms). The One Cable Technology combines motor cable and absolute feedback system in a single cable. The integrated electronic identification plate of the AM81xx motors can be read in automatically by the servo box to configure the motor parameters. In this way, wiring and commissioning requirements are simplified.