
EP7041-2002 | EtherCAT Box, 1-channel motion interface, stepper motor, 48 V DC, 5 A, M12, with incremental encoder


connection
2 | Rx+
3 | Rx-
4 | Tx-
2 | A2
3 | B1
4 | B2
5 | n.c.
3, 4 | GND Motor
2 | Input B
3 | GND
4 | Input A
5 | Output
2 | V Enc
3 | A Enc
4 | B Enc
5 | C Enc
2 | +24 V DC UP
3 | GND
4 | GND

EP7041-2002 | EtherCAT Box, 1-channel motion interface, stepper motor, 48 V DC, 5 A, M12, with incremental encoder

Compact Drive Technology

The EP7041-2002 EtherCAT Box is intended for the direct connection of different stepper motors. The PWM output stages for two motor coils with compact design are located in the module together with two inputs for limit switches and cover a wide voltage and current range. The EP7041-2002 can be adjusted to the motor and the application by changing just a few parameters. 64-fold micro-stepping ensures particularly quiet and precise motor operation. Connection of an incremental encoder enables a simple servo axis to be realized. Two digital inputs and a digital 0.5 A output enable connection of end switches and a motor brake. The external motor is fed via an integrated plug.
Product status:
regular delivery
Product information
| Technical data | EP7041-2002 |
|---|---|
| Protocol | EtherCAT |
| Bus interface | 2 x M8 socket, 4-pin, a-coded, shielded |
| Number of outputs | 1 stepper motor, 1 digital 24 V DC output |
| Number of inputs | 2 digital inputs, encoder system (24 V DC encoder) |
| Connection method | M12 socket, 5-pin, a-coded |
| Load type | 2-phase stepper motor (uni-/bipolar) |
| Nominal voltage | 8…48 V DC |
| Output current | 2 x 3.5 A, 2 x 5 A peak current (overload- and short-circuit proof) |
| Distributed clocks | yes |
| Step frequency | configurable up to 8000 full steps/s |
| Step pattern | 64-fold micro stepping |
| Current controller frequency | approx. 30 kHz |
| Diagnostics LED | error phase A and B, loss of step/stagnation, power, enable |
| Resolution | approx. 5000 positions (per revolution, depending on motor and encoder type) |
| Power supply connection | feed: 1 x M8 male socket, 4-pin, a-coded; downstream connection: 1 x M8 female socket, 4-pin, a-coded |
| Electrical isolation | 500 V |
| Current consumption from US | 120 mA |
| Special features | travel distance control, encoder input, motor supply via plug |
| Weight | approx. 165 g |
| Operating/storage temperature | -25…+60°C/-40…+85°C |
| Vibration/shock resistance | conforms to EN 60068-2-6/EN 60068-2-27 |
| EMC immunity/emission | conforms to EN 61000-6-2/EN 61000-6-4 |
| Protect. rating/installation pos. | IP65/66/67 (conforms to EN 60529)/variable |
| Approvals/markings | CE, ATEX |
| Ex marking | II 3 G Ex nA IIC T4 Gc |
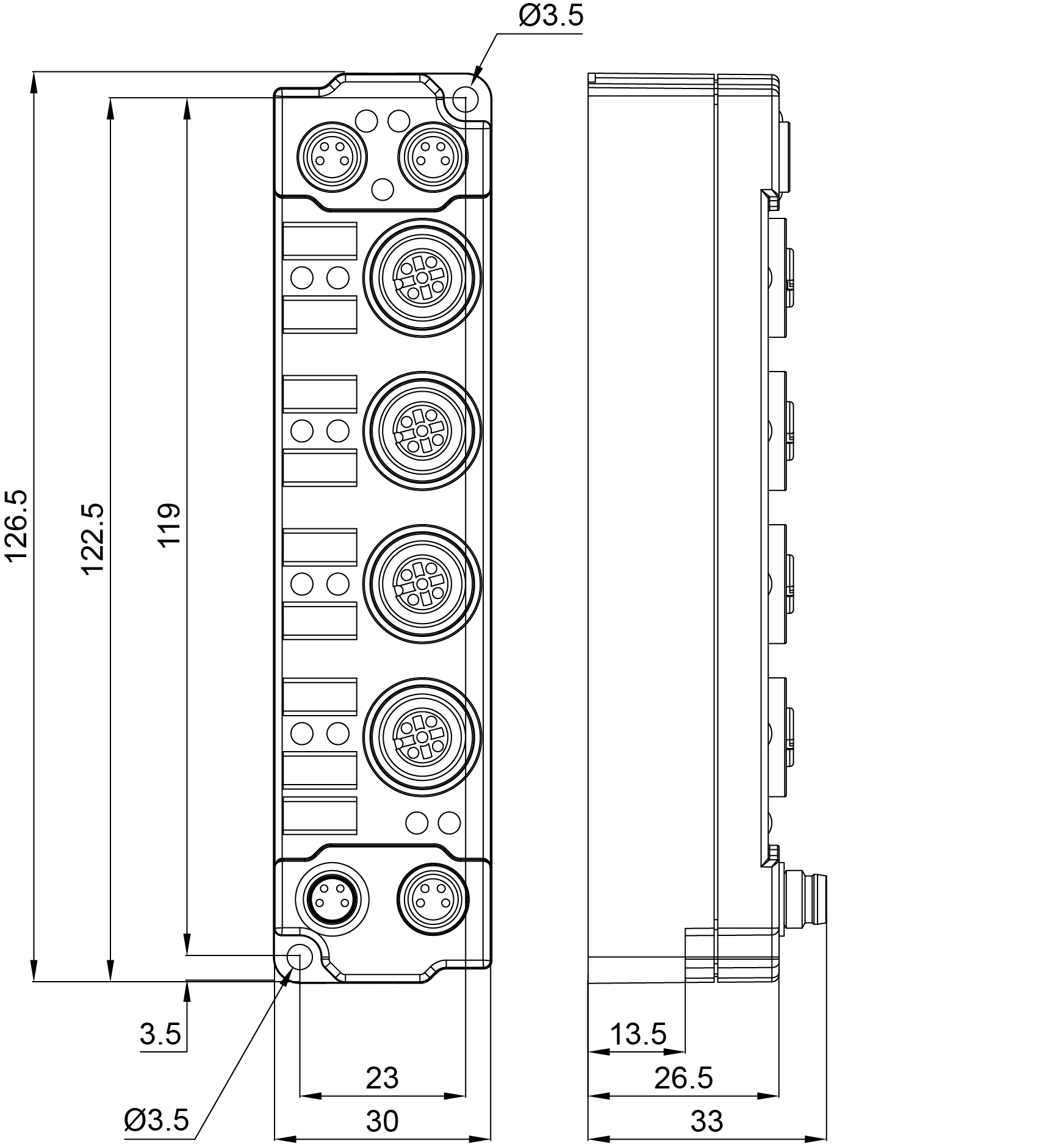
| Housing data | 8 x M8, 4 x M12 |
|---|---|
| Dimensions (W x H x D) | 30 mm x 126 mm x 26.5 mm |
| Material | PA6 (polyamide) |
| Installation | 2 fixing holes 3.5 mm diameter for M3 |
Loading content ...
Loading content ...
Loading content ...
Loading content ...
Loading content ...
Loading content ...
© Beckhoff Automation 2024 - Terms of Use