PC-based control at the core of a demo case for university studies
The IDEA box (Industrial Digitalization in Education of Automation) developed at Heilbronn University of Applied Sciences is designed to introduce students to the topic of Industry 4.0 in a simple and practical way. At the core of the corresponding demo case is PC-based control from Beckhoff, with the C6015 ultra-compact Industrial PC, TwinCAT, and EtherCAT Terminals as a flexible I/O system.

The “magic suitcase full of future technologies” – as Prof. Thomas Pospiech, the initiator of the project, calls it – will benefit students from the technical faculty at Heilbronn University of Applied Sciences (HHN). It enables numerous industrial application scenarios illustrating the increasing convergence of IT and automation to be implemented and solved directly in the lecture hall.
The idea behind the IDEA box
Students build their own electrical circuits with sensors and program the IDEA box so it can read and process the sensor signals. The result may be a graphical display of the development of the measured variables over time, an alarm that is triggered on all IDEA boxes in the lecture hall when limit values are exceeded or not reached, or the activation of a motor in the box. Data communication is transferred to the students’ smartphones via the Internet. The IDEA box is particularly intended to enable students to implement their own ideas due to its wide range of possible uses.
Overall, the demo case covers all the basics of conventional automation technology, from data acquisition and processing via capacitive and inductive proximity switches, for example, to simple single-axis positioning tasks. Prof. Thomas Pospiech adds: “Time-critical applications are also possible, allowing students to gain experience at the limits of the control cycle time.”
The IDEA box is a small case with a volume of approx. 9 l containing the C6015 ultra-compact Industrial PC, an EK1818 EtherCAT Coupler, and several EtherCAT Terminals (e.g., EL3174, EL7047, and EL7211), as well as a Raspberry Pi single-board computer and the sensor and actuator technology. This allows students to operate DC and stepper motors in addition to a synchronous servomotor. Various interfaces and slots also enable users’ own developments to be connected and networked – for example with microcontrollers. This allows cyber-physical system concepts to not only be explained, but actually implemented by students.
System openness through PC-based control
Another contributing factor with regard to the high degree of flexibility is the expansion options; for example, the two existing modules in the case lid – with the sensor technology or the microcontroller technology – can be replaced by new developments. This makes it possible to integrate new learning content, e.g., with an image processing module, without having to completely rebuild the IDEA box. The communication technology is just as flexible as the set-up, thus providing students with as many technical requirements as possible. For example, the C6015 communicates with the I/O terminals via EtherCAT and with cloud solutions via MQTT. ADS, OPC UA, Modbus, WLAN, and the I2C data bus are also implemented.

For Prof. Thomas Pospiech, this kind of system openness is essential in order to teach students as broad a spectrum as possible: “In PC-based control from Beckhoff, I particularly appreciate this openness to any software and all technologies that may come our way and therefore have to be taught. The industrial PC is simply ideal for this purpose. Especially since only this IPC can achieve the level of functionality at such a high packing density. Another major advantage is that TwinCAT also allows other software packages, such as MATLAB®/Simulink®, to be integrated easily and in full.”
The IDEA box was first used at the start of the 2020 semester, which, according to Prof. Thomas Pospiech, brought a rather unexpected advantage of the extremely compact demo case to the fore: “With the onset of the COVID-19 pandemic, we very quickly switched to online lectures, with the huge advantage that students could simply take the IDEA box home with them and work in the same practice-based way as at the university.”
Expansion to include multi-axis motion and robotics
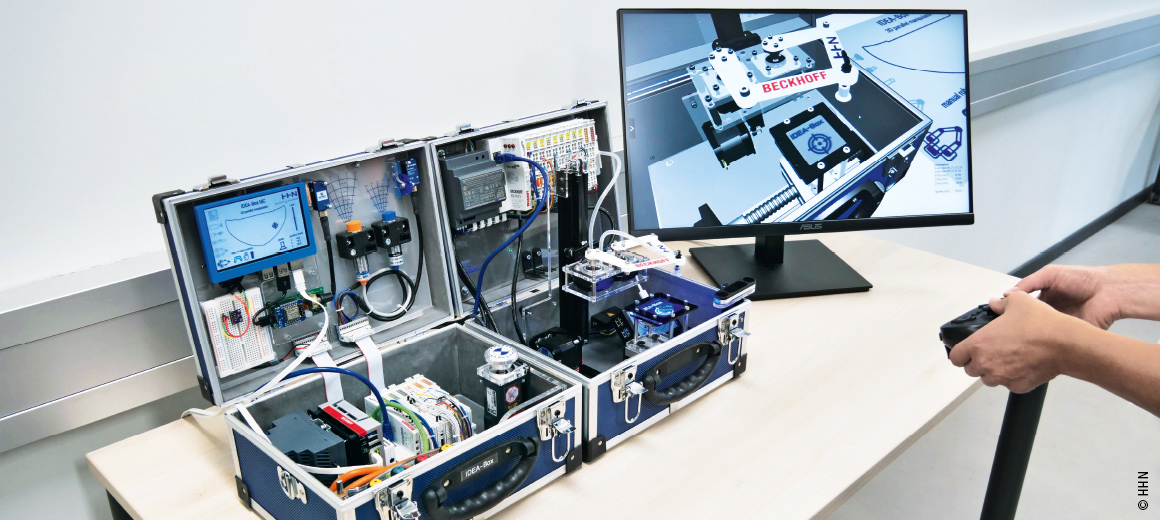
The “Motion Control” expansion box has been developed as a way to teach multi-axis movements and robotics kinematics. It contains the required power supply as well as EtherCAT Couplers and Terminals in the case lid. In addition, there is a single stepper motor, a two-axis kinematic system, and, inside the case, two different linear axes, one of which has a pendulum mechanism. The C6015 provides the control intelligence to the connected IDEA basic box. As Prof. Thomas Pospiech explains: “Using a stepper motor with spindle, for example, the purely mathematical programming can be combined very effectively with the mechanical properties as a way of providing optimal illustration of the overall mechatronic system, with the aspects of motor, rotary motion, spindle or spindle pitch, and feed or reference run. And this is where a major advantage of TwinCAT becomes apparent, because a wide variety of motors – whether stepper motor or servomotor – are handled in exactly the same way in the software application. This means students can be given the knowledge they need based on one motor, and then they can easily transfer what they’ve learned to another motor to reinforce it.”
More complex functions, such as cam plates, anti-oscillation algorithms, and resonance-free positioning, can also be implemented with the Motion Control box and the linear axis with pendulum mechanism. This is helped by the fact that the modular design is applied systematically, i.e., the axes can be easily exchanged, for example as a way of understanding a control engineering model based on the balancing of a ball. The dual-SCARA kinematics are primarily intended to teach the topics of manual referencing and forward and reverse transformation. By combining multiple axes, the complexity can be increased – for example, the robot kinematics and the spindle axis can be combined into a pick-and-place unit by means of a simple conversion.

A digital twin through model integration
A CAD model of the Motion Control box, which can be linked kinematically to the PLC program, gives students their first experience with a digital twin. For Prof. Thomas Pospiech, this is particularly important when considering the future: “Virtual commissioning of the digital machine twin allows development steps to be brought forward and subsequent processing steps to be run in parallel – a prerequisite for Germany to remain competitive as a production location from a global perspective. And our students should be given the best possible training for exactly that.”
According to Prof. Thomas Pospiech, TwinCAT once again offers significant advantages due to its openness: “The oscillation of the pendulum, for example, is not recorded via sensor technology, but is simulated via a corresponding MATLAB®/Simulink® model integrated directly in TwinCAT. A total of five such physical behavior models run on the C6015 ultra-compact Industrial PC, including those for flexible components such as the toothed belt. Communication between the digital twin and the controller runs bidirectionally via TwinCAT ADS.” All geometric distances of the moving components or assemblies can be determined through the integration of virtual sensors in the underlying Unity model. For example, collisions can be detected and robot workspaces can be monitored dynamically. The information can be generated in the Unity model and communicated via feedback to the PLC. This information is processed in the controller in turn and corresponding functions are executed so that appropriate actions are taken.
The IDEA box was developed especially for use in a teaching environment. In recent years, however, it has become apparent that the system is also of great interest to the industry as a way to find suitable solutions as quickly as possible in a wide variety of areas. In addition, Heilbronn University of Applied Sciences makes all programs created during the lectures freely available so that the box can be distributed as widely as possible and inspire young people in particular to take up technical professions. Further expansion stages will also play a part in this, including the control of six-axis kinematics via augmented reality.
Further information




