Produkte

TExxxx | TwinCAT 3 Engineering
Die TwinCAT-3-Engineering-Komponente ermöglicht das Konfigurieren, Programmieren und Debuggen von Applikationen.

TC1xxx | TwinCAT 3 Base
Die TwinCAT-3-Basiskomponenten können mit Functions erweitert werden.

TFxxxx | TwinCAT 3 Functions
Die Basiskomponenten können mit TwinCAT 3 Functions erweitert werden. Die Functions sind in verschiedenen Kategorien klassifiziert, z. B. Motion Control, Messtechnik, Regelungstechnik und Kommunikation.

TwinCAT 3 | Build 4026
Mehr Flexibilität in der Automationsentwicklung durch Modularisierung und Erweiterungen


TwinCAT 3 | Plattform-Level
Die Runtime-Komponenten sind für unterschiedliche Plattform-Level verfügbar, die Plattform-Level entsprechen den TwinCAT-3-Plattform-Leveln der Beckhoff PCs.

TwinCAT 3 | Lizenzierung
TwinCAT 3.1 bietet die Möglichkeit, einen TwinCAT-3-License-Key (Lizenz-Dongle) für die Lizenzierung zu nutzen.

TwinCAT 2
Die TwinCAT-2-Software besteht aus Basiskomponenten TXxxxx und ergänzenden Supplement-Produkten TSxxxx.
Die Welt von TwinCAT: offene, PC-basierte Steuerungstechnik

Mit der Markteinführung der PC-basierten Steuerungstechnik hat Beckhoff einen weltweiten Standard für die Automatisierung geschaffen. Softwareseitig ist seit 1996 die Automatisierungssuite TwinCAT (The Windows Control and Automation Technology) das Herzstück der Steuerung. Im Zusammenspiel mit TwinCAT ergibt das Beckhoff Portfolio optimal aufeinander abgestimmte Automatisierungskonzepte, mit denen die Grundprinzipien einer offenen und hochskalierbaren Steuerungslösung erfüllt werden.
TwinCAT verwandelt nahezu jedes PC-basierte System in eine Echtzeitsteuerung mit mehreren SPS-, NC-, CNC- und/oder Robotik-Laufzeitsystemen. Durch die Möglichkeit modularer Erweiterungen sind Funktionsänderungen und -ergänzungen jederzeit möglich. Die Offenheit der Steuerungslösung erlaubt bei Bedarf nicht nur die Integration von Fremdkomponenten, sondern auch passgenaue Retrofit-Lösungen für existierende Maschinen und Anlagen. Somit werden Flexibilität und Investitionsschutz des Kunden gewährleistet.
TwinCAT 3: die flexible Softwarelösung für PC-based Control

Mit TwinCAT 3, der aktuellsten Version der Software, ergibt das Beckhoff Portfolio optimal aufeinander abgestimmte Automatisierungskonzepte, mit denen die Grundprinzipien einer offenen und hochskalierbaren Steuerungslösung erfüllt werden.
TwinCAT 3 ist die konsequente Weiterentwicklung der Software TwinCAT 2, mit der die Welt der Automatisierungstechnik neu definiert wurde. Die Realisierung der kompletten Steuerungsintelligenz auf einer Software-Plattform, unterteilt in Engineering und Runtime, stellt dabei nach wie vor die Basis des Systems dar.
Sowohl das Engineering als auch die Runtime können flexibel durch anwendungsspezifische Softwaremodule, sogenannte Functions, erweitert werden, sodass das TwinCAT-System perfekt auf individuelle Anforderungen abgestimmt werden kann.
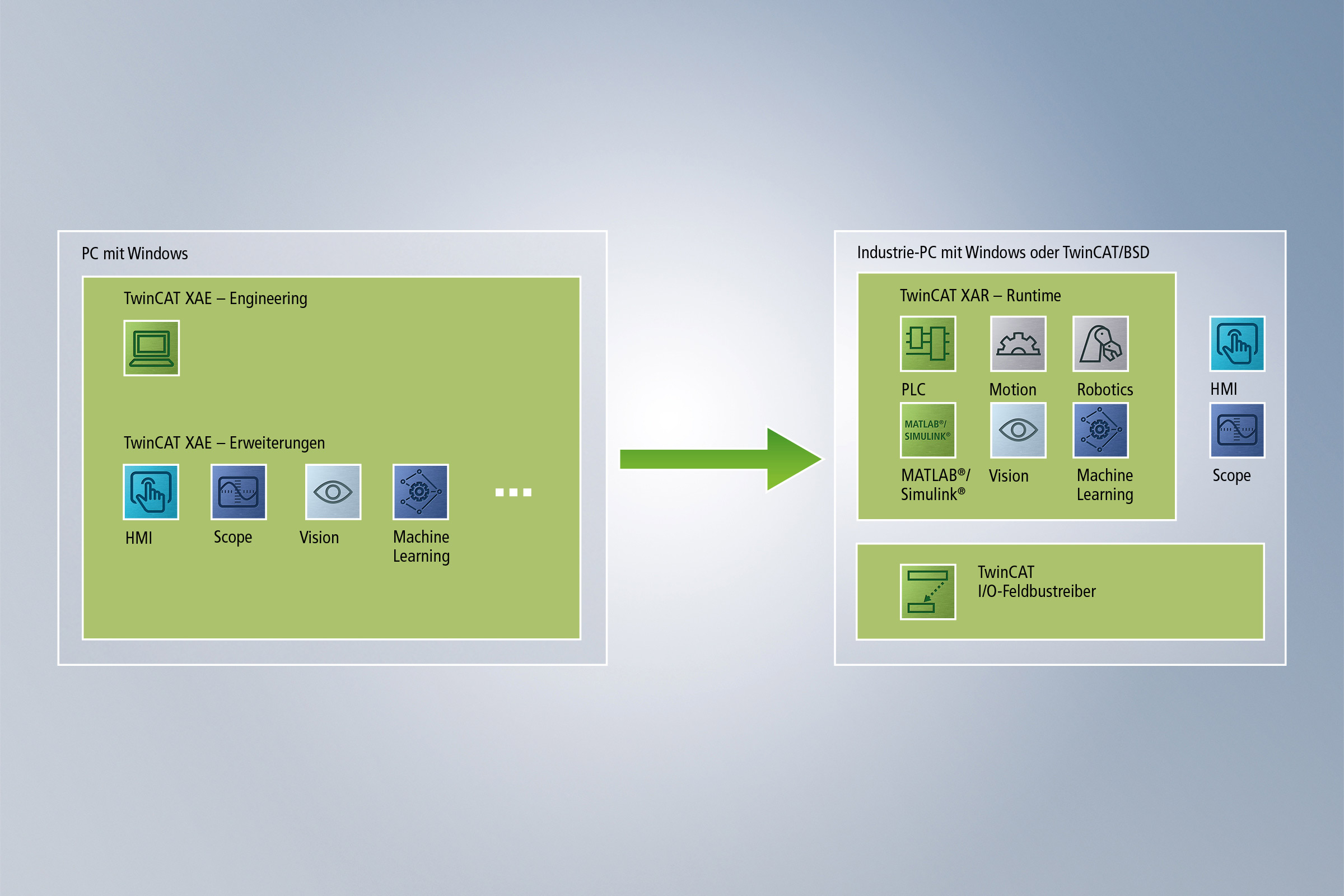
Engineering
Das TwinCAT XAE (eXtended Automation Engineering) ermöglicht die Programmierung und Konfiguration der Hardware in nur einem Engineering-Werkzeug. Für die Programmierung stehen außer den IEC 61131-3-Programmiersprachen auch C/C++, MATLAB® und Simulink® zur Verfügung. Zudem bietet das Tool integrierte Debugging-Möglichkeiten für den Programmcode und Diagnosefunktionalitäten für die Steuerungshardware. Mithilfe sogenannter Functions kann das Basis-Engineering flexibel um Zusatzfunktionalitäten wie zum Beispiel ein Softwareoszilloskop erweitert werden.
Runtime
Die TwinCAT XAR (eXtended Automation Runtime) ist eine echtzeitfähige Laufzeit, in welcher der Programmcode ausgeführt werden kann, um die Feldebene der Maschine zu steuern. Die modulare Architektur ermöglicht es, Erweiterungen in Form von Functions anwendungsspezifisch zu installieren und zu laden. Neben der eigentlichen Echtzeit, die unabhängig vom Betriebssystem ausgeführt wird, läuft auf den PC-basierten Steuerungen immer ein Betriebssystem, welches auch die Ausführung anderer Programme ermöglicht. Somit kann die Steuerungsplattform auch für Aufgaben wie die Visualisierung oder die Ausführung kundenspezifischer Software verwendet werden.
TwinCAT 3 Functions
TwinCAT ist ein modulares System, welches individuell und bedarfsgerecht für Projekte zusammengesetzt werden kann. Diese Modularität wird neben dem eigentlichen Engineering und Steuerungssystem in über 100 sogenannten Functions abgebildet, die unterschiedlichen Themenbereichen zugeordnet sind.
Die TwinCAT Functions erweitern das Basissystem in Bereichen wie Motion und Safety individuell je nach Einsatzzweck. Auch Measurement oder z. B. eine TwinCAT-HMI-basierte Nutzeroberfläche sind Module, die über eine einheitliche Schnittstelle nahtlos mit der eigentlichen Maschinensteuerung interagieren. Für die Unterstützung zusätzlicher Kommunikationsprotokolle wie OPC UA ist nur eine Nachinstallation des entsprechenden Moduls erforderlich. Selbst neueste Functions wie z. B. aus den Bereichen Machine Learning oder Vision sind auf die gleiche Art und Weise nachträglich auf Bestandssystemen installierbar.

TwinCAT 3 System: Einer der großen Vorteile von TwinCAT 3 sind die vielfältigen Erweiterungsmöglichkeiten mit TwinCAT 3 Functions. Die Functions aus dem Bereich „System“ erweitern die Basiskomponenten um wichtige Eigenschaften.

TwinCAT 3 HMI ermöglicht es, plattformunabhängige Bedienoberflächen basierend auf aktuellen Webtechnologien (HTML5, JavaScript/TypeScript) zu entwickeln. Diese agieren „responsive“ und passen sich automatisch der Auflösung, Größe und Orientierung an. Das Engineering des TwinCAT HMIs integriert sich in die gewohnte TwinCAT-Entwicklungsumgebung und bietet einen grafischen What-You-See-Is-What-You-Get (WYSIWYG)-Editor.

TwinCAT 3 Measurement: TwinCAT 3 ist nicht nur eine Automatisierungssoftware, sondern auch eine Messtechniksoftware. Die Measurement Functions erweitern TwinCAT 3 mit zusätzlichen Messtechnikfunktionen und unterstützen so bei der Maschineninbetriebnahme, der Maschinenüberwachung, der Dokumentation von Abläufen und der Darstellung von Mess- und Analyseergebnissen.

TwinCAT 3 Controller: Auch Aufgaben im Bereich der Regelungstechnik können mit Produkten aus dem TwinCAT-3-Baukasten einfach gelöst werden. Zudem steht mit TF4500 ein Produkt zur Spracheingabe und -ausgabe zur Verfügung.

TwinCAT 3 Motion Control beinhaltet skalierbare Softwarepakete zur Bewegungssteuerung. Es umfasst Module von einer einfachen PTP-Anwendung (Punkt-zu-Punkt) über Robotik bis hin zu komplexen CNC-Anwendungen. Eine Abstraktionsschicht zur Hardware ermöglicht eine sehr flexible Ansteuerung verschiedenster Antriebsgeräte.

TwinCAT 3 Connectivity: Einer der großen Vorteile von TwinCAT 3 sind die vielfältigen Möglichkeiten zur Interaktion und Kommunikation mit anderen Systemen – hierfür stehen zahlreiche Functions zur Verfügung, um verschiedene Kommunikationsszenarien zu adressieren und Protokollfunktionen zu implementieren.

TwinCAT 3 Vision: Mit TwinCAT 3 Vision steht eine offene und skalierbare Bildverarbeitungslösung zur Verfügung, die vollständig in die durchgängige Automatisierungsplattform TwinCAT 3 integriert ist. Da die Konfiguration der Kameras und die Programmierung der Bildanalyse in der gewohnten TwinCAT-Umgebung erfolgen, wird das Engineering vereinfacht.

TwinCAT 3 Industry-specific: TwinCAT ist eine universell einsetzbare Steuerungstechnologie für ein dementsprechend breites Anwendungsspektrum. Spezifische und für bestimmte Branchen unerlässliche Anforderungen werden jedoch ebenfalls abgedeckt, z. B. durch genau darauf abgestimmte Erweiterungen, den TwinCAT Functions für industriespezifische Aufgaben.
Neben dem Grundprinzip der Vereinfachung, das bei TwinCAT 3 vom Engineering-Prozess über die Runtime bis hin zur transparenten Kostendarstellung gilt, zeichnet sich die Automatisierungssoftware gleichzeitig durch weitere herausragende Eigenschaften aus:
Reduzierter Engineering-Aufwand: TwinCAT 3 integriert alle Engineering-Komponenten in das Microsoft Visual Studio. Von der SPS-Programmierung bis hin zur Visualisierung und Datenanalyse findet alles in einer durchgängigen Umgebung statt. Davon profitiert der Benutzer durch geringe Schulungs- und Einarbeitungskosten. Die Anbindung an Quellcodeverwaltungssysteme wie zum Beispiel Git ermöglicht die Arbeit an TwinCAT-Projekten im Team. Einzelne Änderungen oder ganze Versionen können so einfach verwaltet werden. Mit der Integrationsmöglichkeit von Continuous Integration und Continuous Delivery in den Engineering-Workflow lassen sich moderne, agile Entwicklungsansätze umsetzen.
Maximale Flexibilität: TwinCAT 3 ermöglicht die hardwareunabhängige Entwicklung der Applikation: von kleinen Steuerungen auf Arm® Basis bis zu Manycore-CPUs. Für die Programmierung der Echtzeit-Steuerungssoftware kann flexibel zwischen den IEC 61131-3-Programmiersprachen, C++ sowie MATLAB® und Simulink® gewählt werden.
Effiziente Projektierung: Die modulare Architektur von TwinCAT erleichtert die Wiederverwendung und Wartung von Software-Komponenten. Auf Basis der objektorientierten Programmierung kann wiederverwendbarer strukturierter Programmcode erzeugt werden. Über einen standardisierten Datenaustausch ist dabei auch die Kommunikation zwischen Modulen einfach umzusetzen, sodass die Module in den IEC 61131-3-Programmiersprachen, C++ oder MATLAB® und Simulink® flexibel miteinander kombiniert werden können.
Freie Wahl der Schnittstellen: TwinCAT 3 stellt eine Vielzahl von Schnittstellen zur Verfügung. So ist eine Anbindung an die IT-Welt von Datenbanken bis zu Cloud-Systemen via OPC UA und andere Protokolle möglich. Dabei können die bestehenden Protokolle durch kundenspezifische Adaptionen erweitert werden. Um flexibel auf Anforderungen im Feldbusbereich reagieren zu können, unterstützt Beckhoff alle gängigen Feldbussysteme.
Faire Preisgestaltung: Das TwinCAT 3 Engineering steht in der Basisfunktionalität kostenfrei zur Verfügung. Auch die TwinCAT Runtime, in der der Steuerungscode ausgeführt wird, kann in einer erneuerbaren 7-Tage-Lizenz getestet werden. Für den dauerhaften Betrieb gilt ein Lizenzmodell in Abhängigkeit von der Leistung der eingesetzten Hardware. Kostenfreier Support steht allen Kunden weltweit zur Verfügung.
Sichere Investition: TwinCAT 3 ist seit 2010 am Markt verfügbar, wobei die Software stetig durch innovative Technologien wie Bildverarbeitung oder maschinelles Lernen weiterentwickelt wird. In der Vorgängerversion erstellte Projekte können auch heute noch mithilfe eines Konverters migriert werden. So ist sichergestellt, dass das Know-how aus älteren Projekten auch in neuen Versionen wiederverwendet und mit neuesten Funktionalitäten erweitert werden kann.