
Interview mit Martin Rostan zu 20 Jahre EtherCAT und der EtherCAT Technology Group
EtherCAT bietet zahlreiche technologische Vorteile, hat in den vergangenen zwei Jahrzehnten aber zudem immens von der Offenlegung des Protokolls und der damit verbundenen Gründung der EtherCAT Technology Group (ETG) profitiert. Im nachfolgenden Interview beschreibt Martin Rostan, Executive Director der ETG, die wichtigsten Aspekte dieser zwei Seiten der EtherCAT-Erfolgsgeschichte.

20 Jahre EtherCAT – wie hat damals alles angefangen?
Martin Rostan: Beckhoff hatte bereits 1989 den Lightbus auf den Markt gebracht, ein Lichtleiter-basiertes Bussystem für die schnelle Kommunikation mit Ein- und Ausgangsbaugruppen. Der Lightbus hatte eine Übertragungsrate von 2,5 MBit/s und nutzte bereits das Prinzip der Verarbeitung im Durchlauf. Ende der 1990er Jahre begannen Überlegungen, eine nächste Generation dieser Lichtleiter-Technologie mit höherer Übertragungsrate zu entwickeln. Der Projektname war Fast Lightbus (FLB). Mit 50 MBit/s wäre dieser zwar nochmals deutlich schneller gewesen, aber es fehlte das „gewisse Etwas“. Das kam erst mit der Idee, das Lightbus-Prinzip mit Ethernet zu verknüpfen.
Was ist das Besondere am Prinzip der Verarbeitung im Durchlauf?
Martin Rostan: Anstatt jedem Netzknoten in jedem Zyklus ein Telegramm zu schicken und von jedem Knoten ein Telegramm zu empfangen, wird ein einziges, entsprechend längeres Telegramm durch alle Knoten geschickt und von diesen im Durchlauf und damit fast verzögerungsfrei verarbeitet. Jeder Knoten liest dabei die für ihn bestimmten Ausgangs-Prozessdaten und fügt seine Eingangsdaten ins Telegramm ein. Da den Netzknoten vorher mitgeteilt wurde, wo die jeweiligen Prozessdaten im Frame zu finden sind, muss keine teilnehmerbezogene Adressinformation mitgeführt werden. Somit bleibt ein Bit ein Bit und wird nicht zu einem kompletten Frame. Und so erreichen wir die maximale Effizienz: Typischerweise werden über 90 % des gesamten Telegramms für Nutzdaten verwendet. Wir nutzen also die Bandbreite optimal aus – und da dasselbe Telegramm für Ein- und Ausgangsdaten verwendet wird, verdoppeln wir die verfügbare Bandbreite meist sogar noch. Deshalb erreicht EtherCAT eine so hohe Performance.
Stichwort Performance: EtherCAT wird als die schnellste Feldbuslösung angepriesen. Warum ist das so wichtig?
Martin Rostan: Für jeden Regelungstechniker liegt auf der Hand, dass kürzere Zykluszeit bessere Regelungsgüte bedeutet und damit letztendlich zu besserer Produktqualität führt. Das gilt für alle Anwendungen mit Motion-Control-Anteil, aber auch für messtechnische Aufgaben. Dank PC-basierter Steuerungen ist die Rechenleistung heute kein Flaschenhals mehr – den bildet meist das Bussystem. Deshalb ist dessen Performance auch immer wichtiger geworden. Wer eine Steuerung, die Zykluszeiten im Sub-Millisekunden-Bereich beherrscht, mit einem Bussystem kombiniert, das hier nicht mitkommt, macht etwas falsch. Weniger offensichtlich ist, wie sehr alle Anwendungen mit sogenannten Weiterschaltbedingungen von der kürzeren Zykluszeit dank EtherCAT und damit von schnellerer Reaktionszeit profitieren: Auch wenn die Steuerung jeweils nur ein paar Millisekunden auf ein Sensorsignal wartet, das die Ankunft des Teils oder das Erreichen der Zielposition bestätigt, bevor sie zum nächsten Bearbeitungsschritt übergeht – diese kleinen Wartezeiten zu reduzieren, lohnt sich und führt zu messbar besserer Effizienz und mehr Durchsatz.
Kommt solch eine anspruchsvolle technische Argumentation bei den Anwendern an?
Martin Rostan: Wir steigen bei EtherCAT schon sehr viel tiefer in die technische Argumentation ein, als das bei den meisten Feldbusorganisationen üblich ist. Aber genau das ist unser Ansatz: mit überzeugender Technologie überzeugen. Und das macht Ingenieuren auch besondere Freude. Als wir EtherCAT im April 2003 auf der Hannover Messe erstmals vorstellten, konnten wir weder mit einer großen Nutzerorganisation punkten noch war Beckhoff damals schon einer der großen Anbieter von Automatisierungslösungen. Und so haben wir die Besonderheiten unserer neuen Technologie erklärt und damit zunächst diejenigen Anwender gewonnen, welche die Vorteile durch die außergewöhnliche EtherCAT-Performance am schnellsten erkannt haben.
Und mit diesen Nutzern wurde dann die EtherCAT Technology Group gegründet?
Martin Rostan: Richtig. Von den 33 Gründungsmitgliedern der ETG waren die Hälfte Anwender – also keine Hersteller von Automatisierungssystemen – und sie galten in ihrer Branche meist als Technologieführer. Also Unternehmen, die ihrerseits gewohnt waren, mit überzeugender Technologie zu überzeugen. Beim Überwinden des Henne-Ei-Problems hat das sehr geholfen.
Das Henne-Ei-Problem?
Martin Rostan: Genau das ist ja eine der Herausforderungen bei der Einführung einer neuen Technologie: Die Anbieter implementieren die Technologie erst, wenn Anwender danach fragen. Und Anwender kann man erst gewinnen, wenn es Anbieter für die entsprechenden Geräte gibt. Eine andere Herausforderung war, dass wir zunächst noch keine kostengünstigen EtherCAT-Chips hatten, sondern mit damals noch sehr teuren FPGAs arbeiten mussten. Eine EtherCAT-Schnittstelle hat anfangs viel Geld gekostet. Mit der Verfügbarkeit der ersten EtherCAT-ASICs im Jahr 2006 hatte sich das Problem aber schnell erledigt. Mittlerweile gibt es die Chips von 13 verschiedenen Herstellern, und die Anschaltkosten liegen unter denen klassischer Feldbussysteme, von anderen Industrial-Ethernet-Lösungen ganz zu schweigen. Und bei EtherCAT genügt in der Steuerung zudem ein ganz normaler Ethernet-Port, was sehr bei der Verbreitung der Technologie geholfen hat.
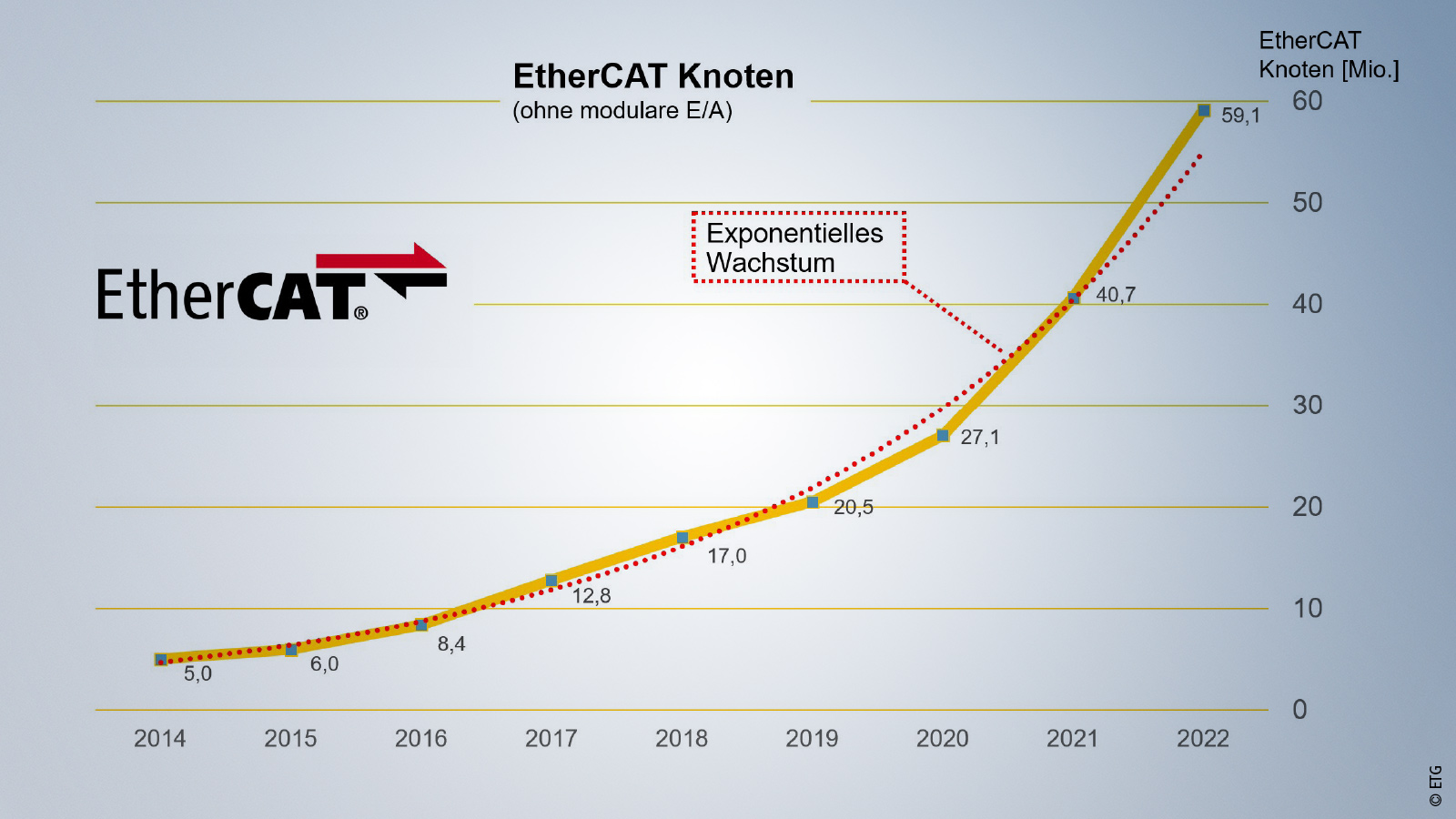
Apropos Verbreitung, die ETG hat anlässlich 20 Jahren EtherCAT erstmals Zahlen veröffentlicht. Warum weichen diese deutlich von den bekannten Marktstudien ab?
Martin Rostan: Eben gerade, weil wir unsere Zahlen jetzt erstmals veröffentlicht haben. Wir waren aus zwei Gründen bisher zurückhaltend: Zum einen, da anfangs die FPGA-basierten Geräte dominiert haben und deren Stückzahlen nicht bekannt waren. Zum anderen konnten wir die modularen Geräte, also die EtherCAT-Klemmen, noch nicht sauber herausrechnen. Schließlich wäre es unfair, eine modulare I/O-Station mit 50 elektronischen Reihenklemmen als 50 EtherCAT-Knoten zu zählen, auch wenn dies tatsächlich 50 EtherCAT-Teilnehmer sind. Mittlerweile nutzen diese Busklemmen aber spezielle Chips, und den Anteil der FPGA-basierten Geräte nehmen wir mit weniger als 10 % an, sodass die Unschärfe dieser Zahl nicht ins Gewicht fällt. Und so kommen wir auf fast 60 Mio. EtherCAT-Geräte, ohne die Busklemmen mitzuzählen. Und das dürfte die Marktführerschaft bedeuten.
Und mit über 7.000 Mitgliedsfirmen ist die ETG der weltgrößte Feldbusverband. Wie kam es dazu?
Martin Rostan: Die Technologie und ihr Anwendernutzen stehen zwar sicherlich im Vordergrund, aber zum Erfolg von EtherCAT hat auch die außerordentlich engagierte Mannschaft der EtherCAT Technology Group ganz entscheidend beigetragen. Die Technik-Team koordiniert ja nicht nur die technischen Arbeitskreise, schreibt Spezifikationen und vertritt EtherCAT in den verschiedenen Normungsgremien, sondern unterstützt vor allem unsere Mitglieder bei der Implementierung der Technologie. Das bedeutet Tech-Support und Workshops ebenso wie regelmäßige Interoperabilitäts-Meetings, sogenannte Plugfests, die wir weltweit durchführen. Unsere Mitglieder schätzen die Qualität unserer Implementierungsunterstützung sehr und tragen in unserem umfassenden Online-Entwicklerforum auch aktiv dazu bei. Das Marketing-Team ist ebenso engagiert dabei und organisiert hochwertige Messestände und Technologie-Seminare, die wir mittlerweile in über 50 Ländern durchgeführt haben. Anfangs hätte ich nicht gedacht, dass 1.000 Mitgliedsfirmen möglich sind – und bis jetzt lässt das Wachstum immer noch nicht nach. Mittlerweile kommen jedes Jahr fast 500 neue Mitgliedsfirmen hinzu.
Und das wird alles von Deutschland aus organisiert?
Martin Rostan: Die Zentrale der EtherCAT Technology Group hat ihren Sitz zwar in Nürnberg, aber wir unterhalten Büros in China, Korea, Japan und den USA, die weitgehend eigenständig tätig sind und die Mitglieder vor Ort unterstützen. Über 3.000 Mitgliedsfirmen aus Asien zeigen, dass EtherCAT auch auf diesem Kontinent führend ist. Und mit über 1.000 Mitgliedern in Amerika ist die ETG dort ebenfalls der mitgliederstärkste Feldbusverband.

Ein guter Grund, um zu feiern. Ein weiterer sind sicherlich einige besondere EtherCAT-Anwendungen, oder?
Martin Rostan: So manche EtherCAT-Applikation freut einen schon ganz besonders. Für mich als Segler gehören die Hightech-Yachten des America’s Cup dazu, die alle EtherCAT einsetzen. Als Luft- und Raumfahrttechnikingenieur begeistert mich natürlich auch EtherCAT im Weltall: EtherCAT war schon auf der ISS im Einsatz und wurde für die Roboter auf der Lunar-Gateway-Raumstation ausgewählt. EtherCAT fährt aber auch auf Traktoren mit und hilft bei den Experimenten, mit denen Physik-Nobelpreise gewonnen wurden.
Konnte sich EtherCAT bei diesen Anwendungen nur wegen seiner Schnelligkeit durchsetzen?
Martin Rostan: Nein. Die Performance von EtherCAT ist zwar oft entscheidend, aber das spezielle Funktionsprinzip bietet weit mehr Vorteile. So werden die Netzknoten im Hochlauf automatisch adressiert, was die Inbetriebnahme stark vereinfacht. Netzwerk-Teilnehmer lassen sich hochgenau synchronisieren, sogar ohne spezielle Hardware in der Steuerung. EtherCAT-Anwender benötigen kein spezifisches IT-Know-how, keine Switche und werden auch nicht durch kaskadierte Switche eingeschränkt. Es sind also Linientopologien mit nahezu beliebig vielen Teilnehmern möglich, ebenso wie Abzweige, Baumtopologien und Ringe für Leitungsredundanz – ohne spezielle Redundanz-Teilnehmer. Zudem verfügen die EtherCAT-Chips über besondere Diagnoseeigenschaften, mit deren Hilfe Bitfehler und sogar lose Stecker nicht nur zuverlässig erkannt, sondern sogar lokalisiert werden können. Das alles spart viel Zeit und Geld.
Wie reagieren die anderen industriellen Kommunikationssysteme auf die Erfolgsgeschichte EtherCAT?
Martin Rostan: Beispielsweise mit Gigabit und TSN-Technologien versucht man, unseren Performance-Vorteil aufzuholen. Aber wer rechnen kann, stellt schnell fest, dass das EtherCAT-Funktionsprinzip auch mit Gigabit nicht zu schlagen ist. EtherCAT wird auch mit 100 MBit/s performanter bleiben, wenn man realistische Szenarien vergleicht. Und für Anwendungen, die tatsächlich mehr Bandbreite erfordern, steht EtherCAT G als Technologieerweiterung bereit. Die robustere 100-MBit/s-Technik wird allerdings durch EtherCAT G nicht abgelöst, sondern ergänzt. Ich gehe davon aus, dass auch in 15 Jahren 95 % der EtherCAT-Geräte 100 Mbit/s nutzen werden. Damit bleibt die Stabilität von EtherCAT erhalten: Wir haben EtherCAT stets nur erweitert, nie verändert.
Wie sehen die nächsten 20 Jahre für EtherCAT aus?
Martin Rostan: Vor 20 Jahren hatte ich mutig prognostiziert, dass EtherCAT zehn Jahre später die Nummer 2 im Markt sein würde. Heute, weitere zehn Jahre später, sind wir noch weiter vorn. Ich sehe zudem keine Entwicklung, die das ändern sollte. Mit EtherCAT G ertüchtigen wir unsere Technologie für Anwendungsbereiche, die noch mehr Bandbreite benötigen, und machen EtherCAT zukunftssicher. Und wenn ich das Mitgliederwachstum der ETG ansehe: Das Ende der Fahnenstange ist offenbar noch lange nicht erreicht.
Weitere Informationen

