
TwinCAT MC3: die neue Multicore- und Multitask-Lösung für Motion Control

Motion Control ist ein etablierter und wesentlicher Bestandteil von TwinCAT und in vielen Projekten branchenübergreifend erfolgreich im Einsatz. Die nächste Motion-Control-Generation ist TwinCAT MC3. Alle Erfolgsmerkmale der bisherigen Motion-Control-Lösung von TwinCAT NC2 bleiben auch in der neuen Generation TwinCAT MC3 erhalten.
Die wichtigsten Features von TwinCAT MC3 sind:
- vollständige Systemintegration
- skalierbare Performance
- Hardwareunabhängigkeit
Zudem gibt es in der neuen Generation grundsätzlich keine feste Beschränkung der Anzahl der programmierbaren Achsen mehr. Diese entscheidenden Features machen TwinCAT MC3 zu einem hoch performanten Tool im Bereich von Motion-Softwarelösungen.
Vorteile von TwinCAT MC3 im Detail

Die nahtlose Integration von TwinCAT MC3 in das TwinCAT-System bedeutet, dass sich die Motion-Control-Lösung nicht nur parallel zu den anderen TwinCAT-Funktionen auf einem System betreiben lässt, sondern auch mit den anderen TwinCAT-Funktionen interagieren kann.
Beispiele hierfür sind:
- TwinCAT MC3 kann parallel zur bisherigen Motion-Control-Lösung NC2 betrieben werden. Zudem lassen sich MC3-Achsen auch auf bestehende NC2-Achsen koppeln. Dadurch ist es möglich, neue Maschinenkomponenten mit TwinCAT MC3 umzusetzen, ohne die bestehenden Maschinenkomponenten, die NC2 verwenden, anpassen zu müssen.
- TE5950 TwinCAT 3 Drive Manager 2 unterstützt bei der Inbetriebnahme von Beckhoff Antriebslösungen und kann, wie von NC2 gewohnt, auch MC3-Konfigurationen und MC3-Achsen automatisch mit Standardparametern erstellen.
- Mit TwinCAT Scope steht ein leistungsfähiges Diagnosetool zur Verfügung, mit dem sich Bewegungen und Dynamiken aufzeichnen und anschließend mithilfe verschiedener Werkzeuge manuell analysieren lassen. Die Software ist vollständig kompatibel mit TwinCAT MC3. Somit können Positionen und Bewegungen sowohl von NC2-, als auch von MC3-Achsen aufgezeichnet, in YT-Charts dargestellt und analysiert werden.


TwinCAT MC3 besitzt eine neue modulare Architektur. Durch die daraus resultierende konsequente Multicore- und Multitask-Unterstützung kann die CPU-Performance des Steuerungsrechners optimiert ausgenutzt werden:
Multicore-Unterstützung
TwinCAT MC3 lässt sich bedarfsgerecht auf mehrere CPU-Kerne verteilen. Dabei sind synchronisierte Bewegungen über alle verwendeten CPU-Kerne möglich.
Multitask-Unterstützung
Auf einem CPU-Kern können Achsen mit unterschiedlichen Zykluszeiten betrieben werden, genau passend zu den Geschwindigkeiten und Aufgaben der jeweiligen Achsen. So ist eine optimierte Ausnutzung eines CPU-Kerns möglich, da die „schnellste“ Achse nicht zwangsweise den Takt für alle Achsen vorgibt. Auf diese Weise können die Achsen eines Transportbands mit Delta-Picker mit 1 ms Zykluszeit betrieben werden, um ein schnelles Aufnehmen der Werkstücke sicherzustellen, während die Achsen zur Breitenverstellung des Transportbands mit 4 ms Zykluszeit auf demselben CPU-Kern betrieben werden.
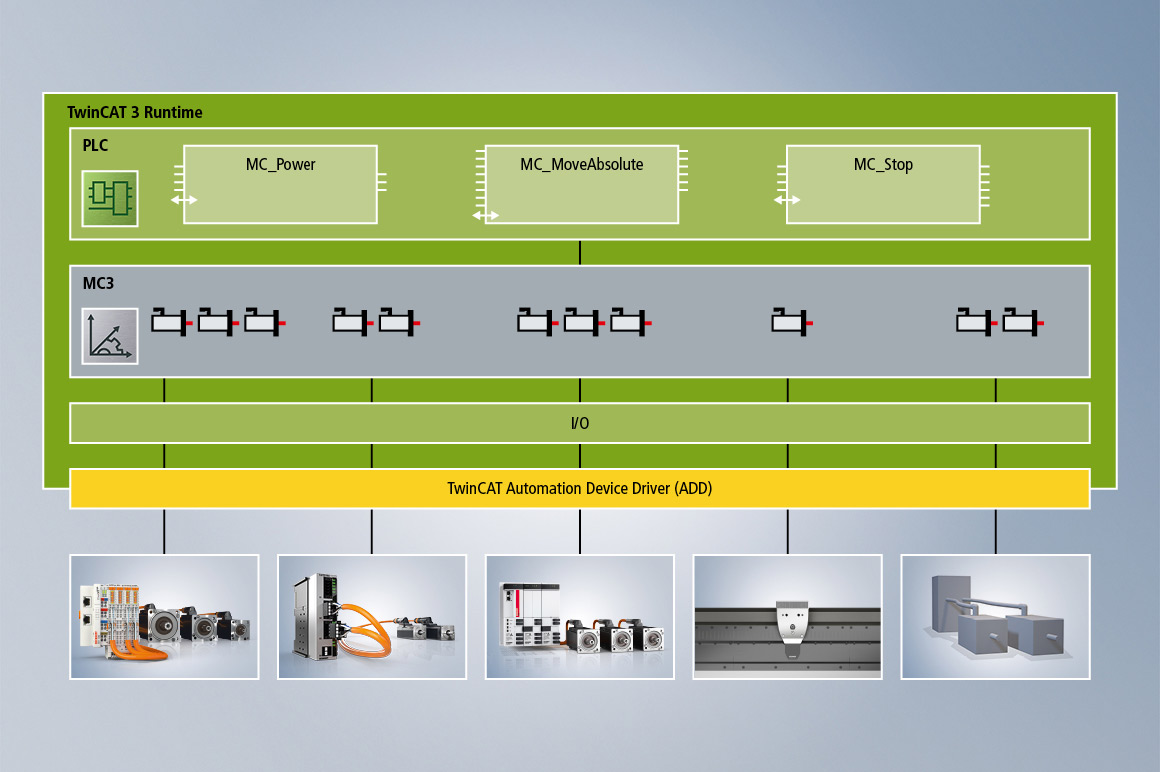
Wie bei der bisherigen Motion-Control-Lösung werden bei TwinCAT MC3 Achsen in Achsobjekte abstrahiert, welche die Hardware und die Programmierung voneinander trennen. Auf diese Weise entsteht eine Hardwareunabhängigkeit, deren Vorteile sich in folgenden Eigenschaften zeigt:
Unabhängig durch Simulation von Achsen
Achsen können simuliert werden, wobei auch eine Mischung aus realen und simulierten Achsen in einem Projekt möglich ist. Die Umschaltung zwischen realer und simulierter Achse kann in der Konfiguration mit einem Mausklick sowohl für eine einzelne Achse als auch für eine Gruppe von Achsen erfolgen. So ist es möglich, die Achsen ohne Verbindung zur Hardware zu programmieren. Hierdurch reduziert sich die Inbetriebnahmezeit an der realen Maschine.
Unabhängig vom Antriebssystem
Unterschiedlichste Antriebssysteme, wie z. B. Servo-, Schritt- und DC-Motoren sowie das Produkttransportsystem XTS, werden gleichermaßen in Achsobjekte abstrahiert und lassen sich somit einheitlich programmieren. Zur Programmierung steht die TwinCAT-Bibliothek Tc3_Mc3 mit den bereits aus der NC2 bekannten, PLCopen-konformen Funktionsbausteinen zur Verfügung. Mit TwinCAT MC3 werden nun auch Hydraulik-Achsen unterstützt und vollständig integriert. Die allgemeine Programmierung erfolgt hierbei über die gleichen PLCopen-konformen Funktionsbausteine, wie sie für elektrische Achsen genutzt werden. Für spezielle Fluid-Power-Funktionalitäten gibt es zudem eine Bibliothek mit ergänzenden Funktionsbausteinen.
Freiheit in der Wahl des Bussystems
TwinCAT ist eine offene Steuerungsplattform, die neben dem hochleistungsfähigen Kommunikationssystem EtherCAT auch alle weiteren gängigen Feldbussysteme unterstützt.