


运动控制一直是倍福 TwinCAT 自动化软件的重要组成部分,并成功应用于各个行业领域。TwinCAT MC3 是新一代运动控制软件产品。新一代 TwinCAT MC3 继承了前代 TwinCAT NC2 运动控制解决方案的所有出色功能。
TwinCAT MC3 最基本的功能包括:
- 完整的系统集成解决方案
- 可满足各种性能等级需求
- 硬件独立性优势
另外一个亮点是,新一代产品对可编程轴的数量也不再限制。这些令人印象深刻的出色功能使 TwinCAT MC3 成为高性能的运动控制软件解决方案。
TwinCAT MC3 的优势

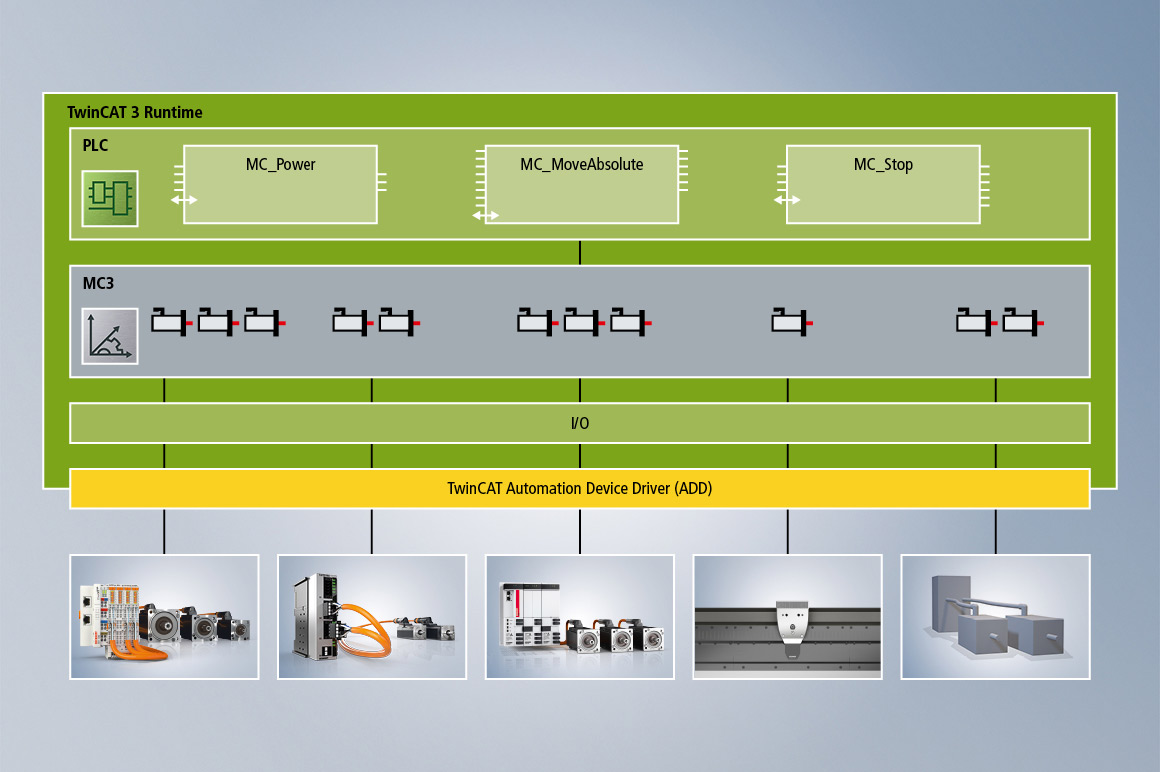
TwinCAT MC3 与 TwinCAT 系统的无缝集成意味着运动控制解决方案不仅可以在一个系统中与其它 TwinCAT 功能并行运行,而且还可以与其它 TwinCAT 功能进行交互。
其亮点如下:
- TwinCAT MC3 可以与前代的 NC2 运动控制解决方案并行工作,MC3 轴还可耦合到现有的 NC2 轴上。因此,无需调整使用 NC2 的现有设备组件,即可使用 TwinCAT MC3 开发新的设备功能。
- TE5950 TwinCAT 3 Drive Manager 2 支持调试倍福驱动解决方案,与 NC2 的典型功能一样,它还可以自动生成 MC3 配置和具有标准参数的 MC3 轴。
- TwinCAT Scope 是一款功能强大的诊断工具,可用于记录各个运动和动态性,然后使用各种工具箱手动进行分析。由于该软件与 TwinCAT MC3 完全兼容,因此它可以记录 NC2 和 MC3 轴的位置和运动,在 YT 图表中显示信息并分析数据。


TwinCAT MC3 采用全新的模块化结构,全面支持多核技术和多任务并行处理,可以充分利用控制计算机 CPU 内核的性能:
支持多核技术
TwinCAT MC3 可以根据需要分配给多个 CPU 内核。实现所有内核的运动同步。
支持多任务并行处理
可以根据各个轴的速度和功能,在同一 CPU 内核上以不同的周期时间运行这些轴。由于其它轴不需要再向刷新速度最快的轴看齐,因此能够充分利用 CPU 内核的性能。这样,基于 Delta 拾放机器人的传送带轴可以以 1 ms 的周期时间运行,以确保快速拾取工件,而传送带宽度调节轴则在同一 CPU 内核上以 4 ms 的周期时间运行。
TwinCAT MC3 与前代运动控制解决方案一样,将轴抽象为一个个轴对象,将硬件与编程过程分离开来。这样就可以带来硬件独立性优势,具体如下:
通过轴仿真实现独立性
可以实现轴仿真,并可在同一个项目中混合使用真实轴和仿真轴。在配置时,只需轻轻点击一下,即可在真实轴和仿真轴之间进行切换,无论是单个轴还是一组轴。这样就可以在没有与硬件连接的情况下对轴进行编程,并缩短了真实机器的调试时间。
独立于驱动系统
诸如伺服电机、步进电机、直流电机等各种驱动系统以及 XTS 磁驱柔性输送系统,都可以抽象为轴对象,从而进行统一编程。TwinCAT Tc3_Mc3 软件库包含了 NC2 中用户所熟悉的符合 PLCopen 标准的功能块,为编程提供了便利。TwinCAT Mc3 还支持液压轴以及完全集成。通过电动轴使用的符合 PLCopen 标准的相同功能块进行通用程序设计。此外,还有一个包含扩展功能块的软件库,它主要用于特殊的流体传动功能。
自由选择总线系统
TwinCAT 是一个开放式控制平台,支持 EtherCAT 高性能通信系统以及其它所有常见的现场总线系统。