More flexibility in automation development through modularity and extensions

Thanks to a new type of mediatized setup, TwinCAT can not only be installed on an industrial PC in three variants as before. Instead, specific packages can be selected according to preference and then installed or updated. In addition to being able to update components independently, customers simultaneously benefit from faster installation and shorter update times.

TwinCAT 3.1 Build 4026 can also be used with Microsoft Visual Studio 2022. The support of Microsoft Visual Studio 2022 provides a 64-bit environment for engineering, allowing more main memory to be used for larger projects. The XaeShell supplied by TwinCAT is also available in an updated variant based on Microsoft Visual Studio 2022. TwinCAT 3.1 Build 4026 supports Microsoft Visual Studio 2022 as well as the 2017 and 2019 versions.
The innovations at a glance




This short video introduction and the webinars for the new TwinCAT 3.1 Build 4026 offer an overview of the most significant innovations in the following version:
- TwinCAT 3.1 Build 4026 – What's new?
- TwinCAT 3.1 Build 4026 – Introduction (webinar)
- TwinCAT 3.1 Build 4026 – PLC updates (webinar)
- TwinCAT 3.1 Build 4026 – Package management (webinar)
Previous version TwinCAT 3.1 Build 4024
The previous version of TwinCAT 3.1 Build 4026 is the Build 4024 version. It is also still valid. All properties of Build 4024 are included in the latest version 4026.
Build 4024: Increased efficiency and integration in engineering
- integration of the Microsoft Visual Studio® 2017 Shell (TcXaeShell)
- new start page with new RSS feed with TwinCAT info
- support for Microsoft Visual Studio 2019 (Build 4024.10 and higher)
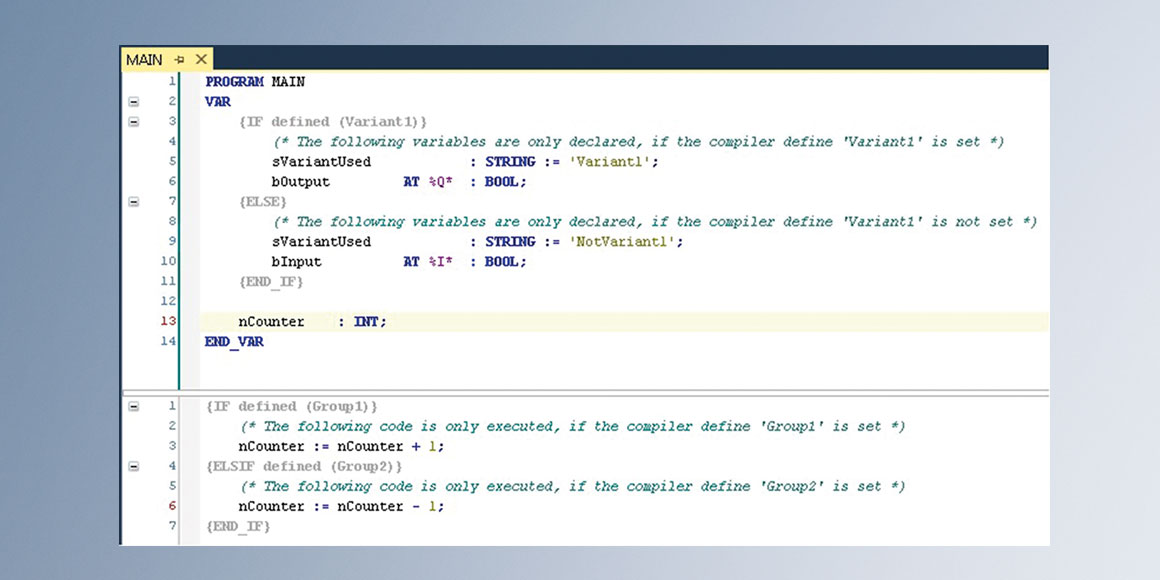
- easy configuration of machine variants
- variant-specific de-/activation of components
- variant-specific parameterization
- shown by 'conditional compilation' in the PLC

- several programmers can work on a PLC project simultaneously
- integrated workflow
- reduces the commissioning time
- high traceability