
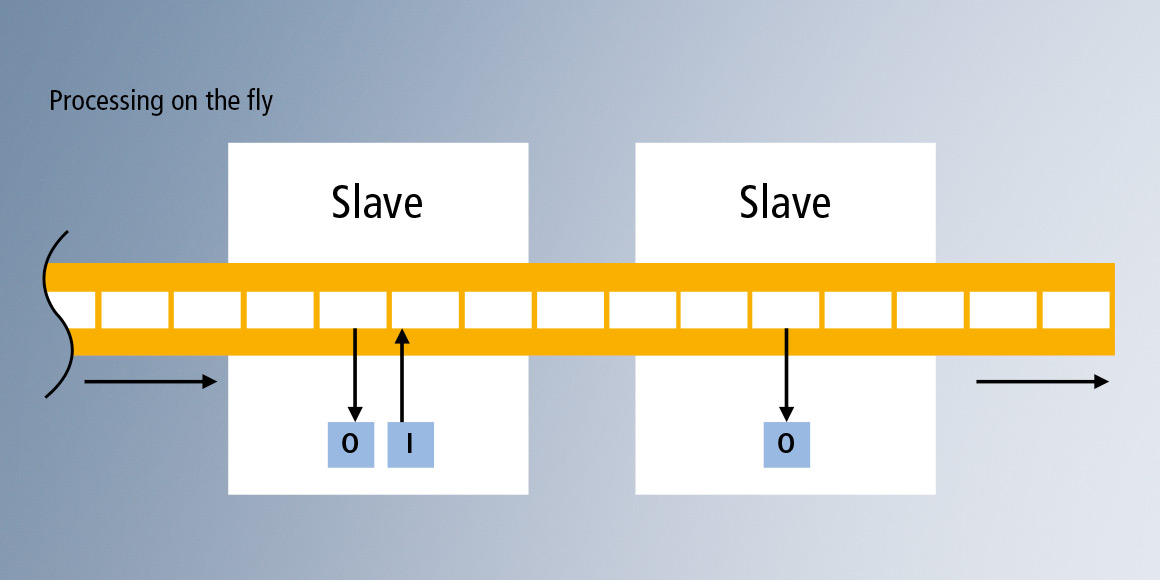
Telegram processing on the fly at 100 Mbit/s, 1 Gbit/s and 10 Gbit/s
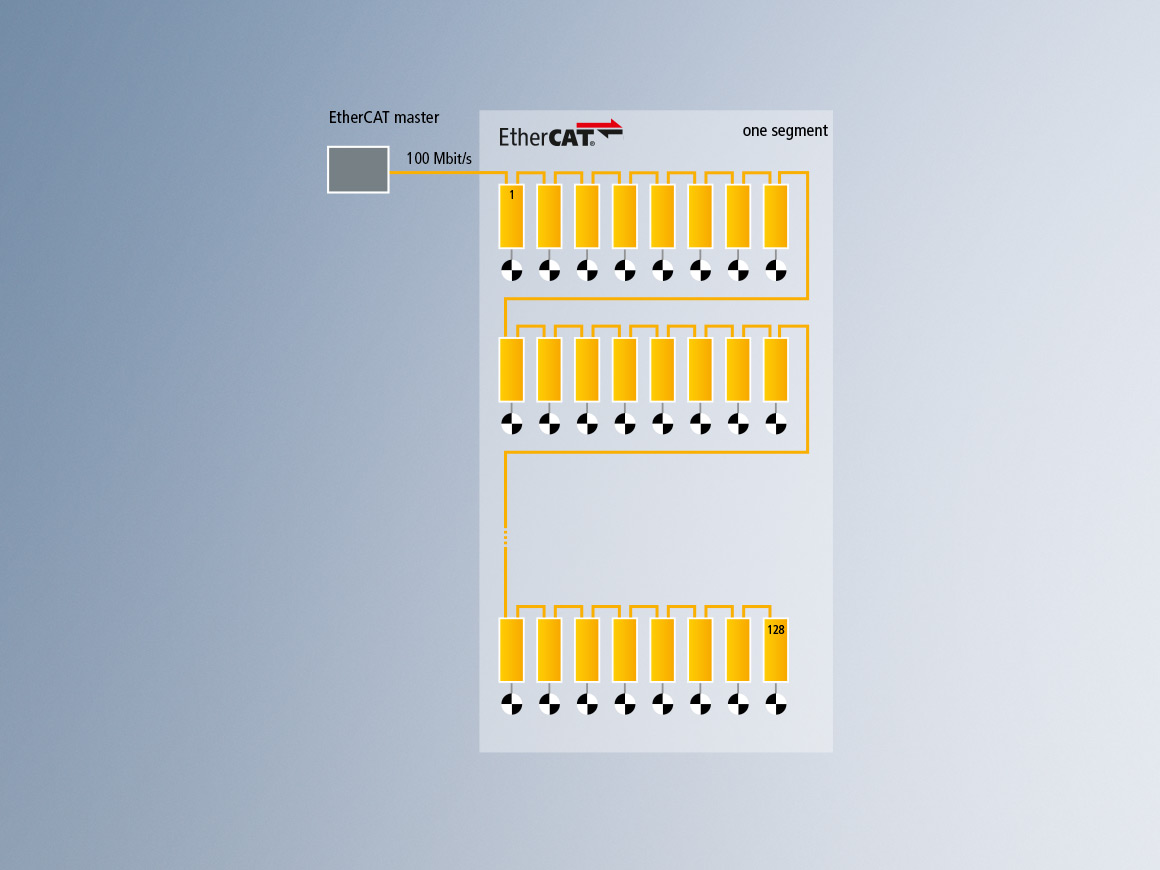
EtherCAT G builds on the principles of the successful EtherCAT technology but moves the available data rates up to 1 Gbit/s and 10 Gbit/s. The EtherCAT protocol itself remains unchanged. As before, the devices on a network receive the telegrams sent by the EtherCAT master. Each EtherCAT slave still reads the data addressed to it “on the fly” and inserts its own data into the frame as the frame moves downstream; now, though, it does this at 1 Gbit/s or 10 Gbit/s. Hardware propagation times are the only factor delaying telegram processing. The last device in a segmentor stub line identifies an open port and utilizes the full duplex feature of Ethernet network physics to send the telegram back to the master.
EtherCAT G and EtherCAT G10 also retain all other capabilities of EtherCAT. Devices with three or four ports (junctions) enable users to flexibly configure network topologies that suit the exact requirements of their machine architecture. Optional machine modules can still be plugged and unplugged via the Hot Connect feature. Network-wide diagnostics are available to help minimize machine downtime and increase availability. And the built-in system of distributed clocks still ensures devices are synchronized precisely in better than 100 ns.
Real-time Ethernet down to the I/O level
- flexible topology
- outstanding diagnostics
- synchronization accuracy better than 100 ns
- exceptionally simple configuration
- low system costs
- maximum performance
- ability to integrate functional safety
- IEEE-802.3 compliant
EtherCAT G: Expanding the application range of EtherCAT
High performance, high complexity – 100 servo axes every 30 μs, 2,000 digital inputs/outputs every 15 μs
The exceptional performance of EtherCAT has succeeded in satisfying user requirements of almost every kind across countless industry sectors and applications – in everything from highly dynamic machine tools and complex packaging systems through to logistics centers. Machine vision, condition monitoring and highly innovative transport systems like the eXtended Transport System (XTS) and XPlanar all rely on the ability to transmit several hundred bytes of process data per device and cycle. This, along with short cycle times of ≤ 1 millisecond, calls for high data bandwidths. With EtherCAT G, applications and systems like these can be supported with a single EtherCAT G master while at the same time incorporating other automation equipment or drives. The new branch model was developed to address growing demand for ever shorter cycle times in increasingly extensive systems integrating large numbers of devices. Now, large-scale systems can be synchronized and operated using a single, central master.


Measurement technology
- Oversampling allows signal acquisition at higher resolutions,independently of the control cycle.
- sampling rates of 100…50 ksamples/s
Motion
- highly dynamic motion control and exact synchronization of a large numbers of (coupled) axes

XFC
- eXtreme Fast Control
- I/O response times < 100 μs
- higher resolution through EtherCAT G/G10
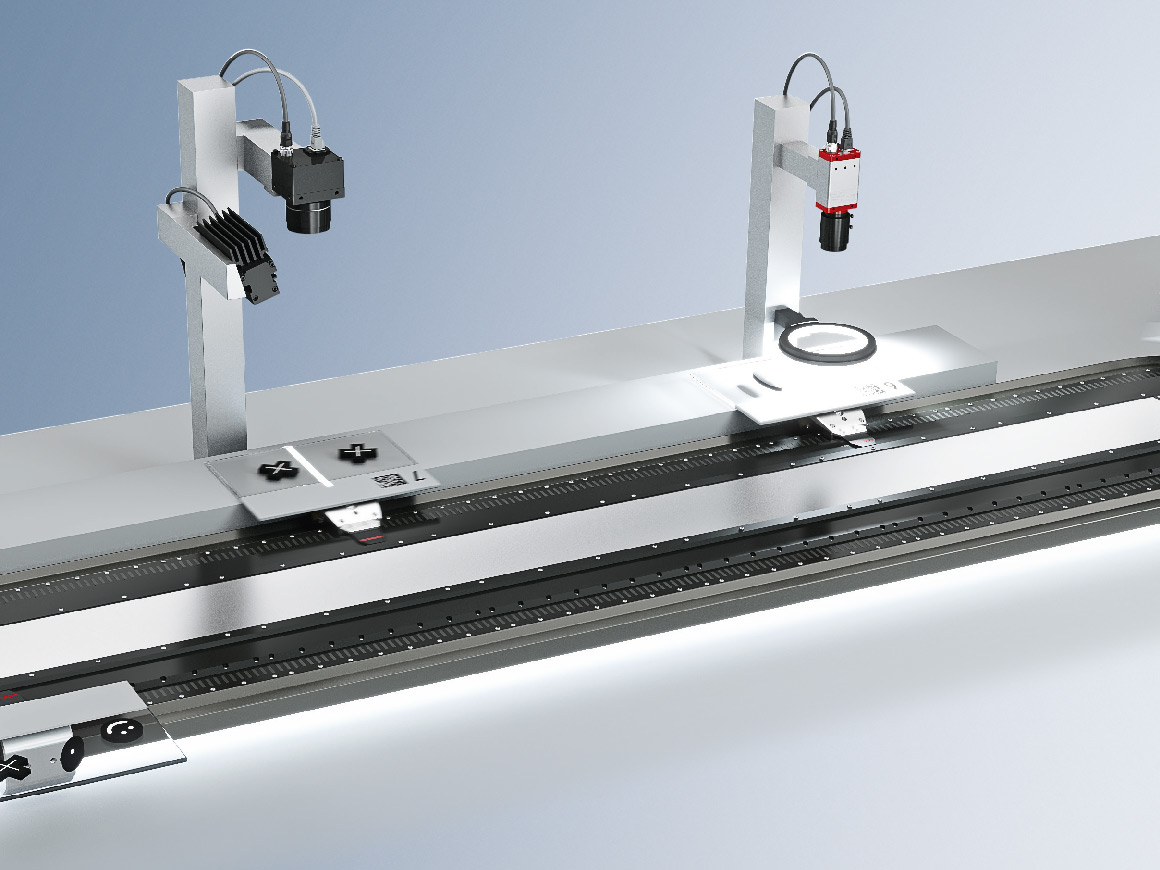
Vision
- transmission of high-resolution images captured at rapid frame rates
- process-synchronized triggering of image capture
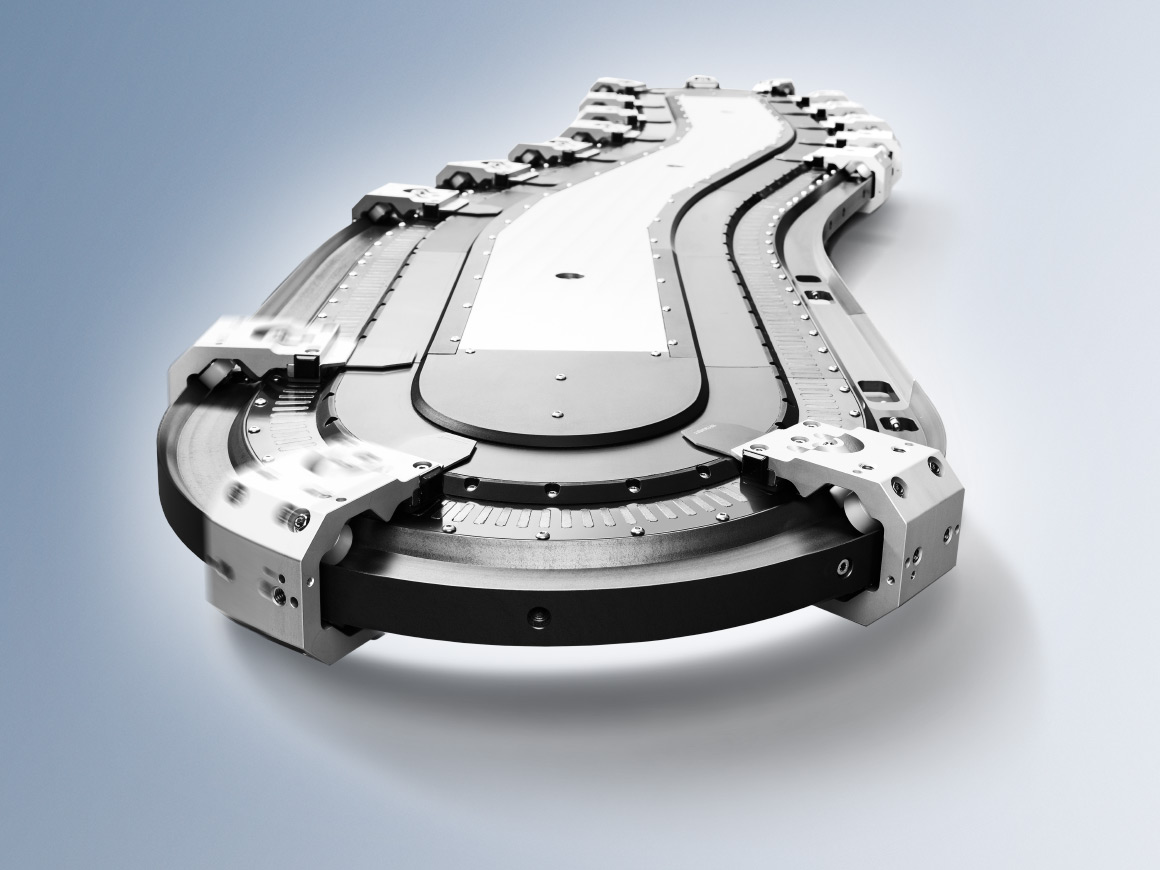
XTS
- very high data rates (25 Mbit/s per meter of XTS track) through transmission of actual mover positions
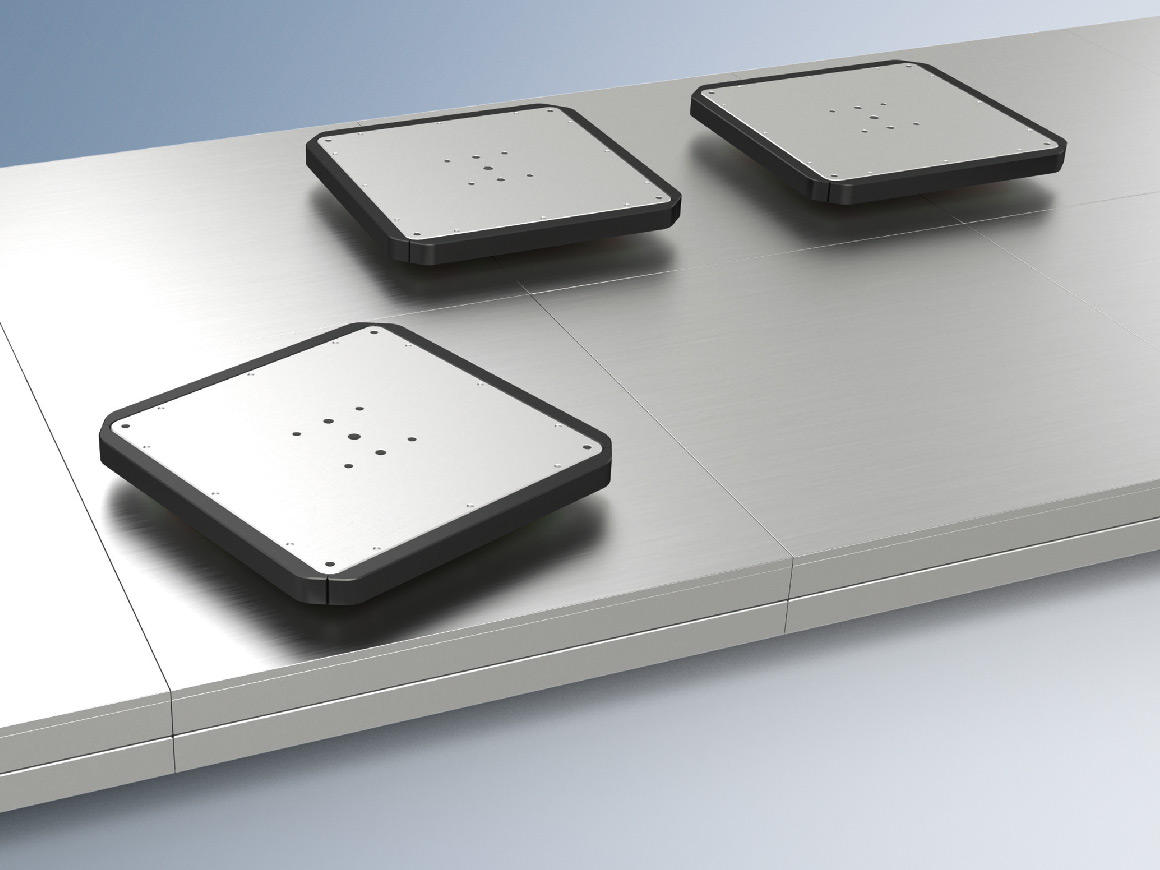
XPlanar
- Infinitely variable positioning with six degrees of freedom calls for high data rates and fast response times.
EtherCAT branch management
- integration of 100 Mbit/s devices and segments within EtherCAT G networks
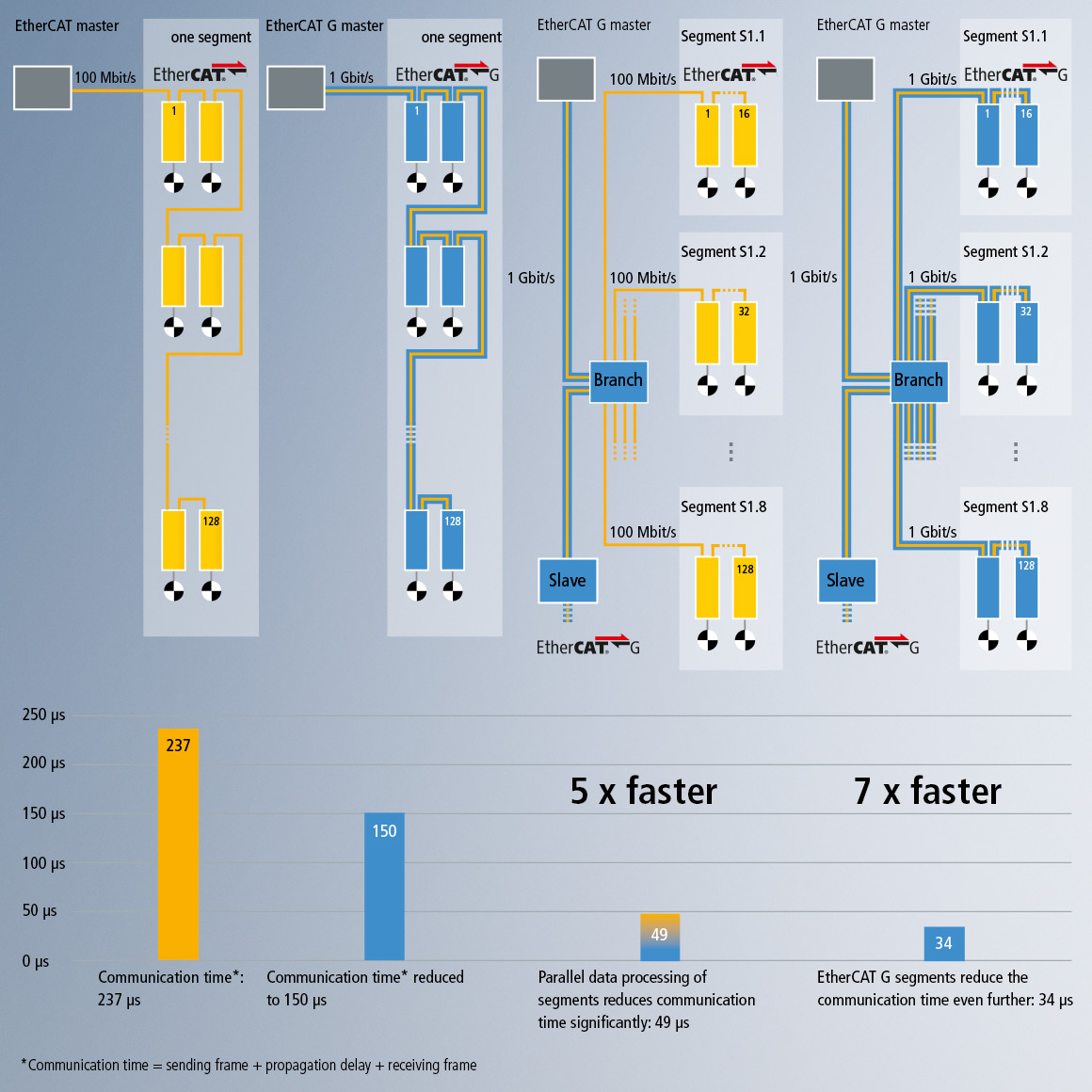
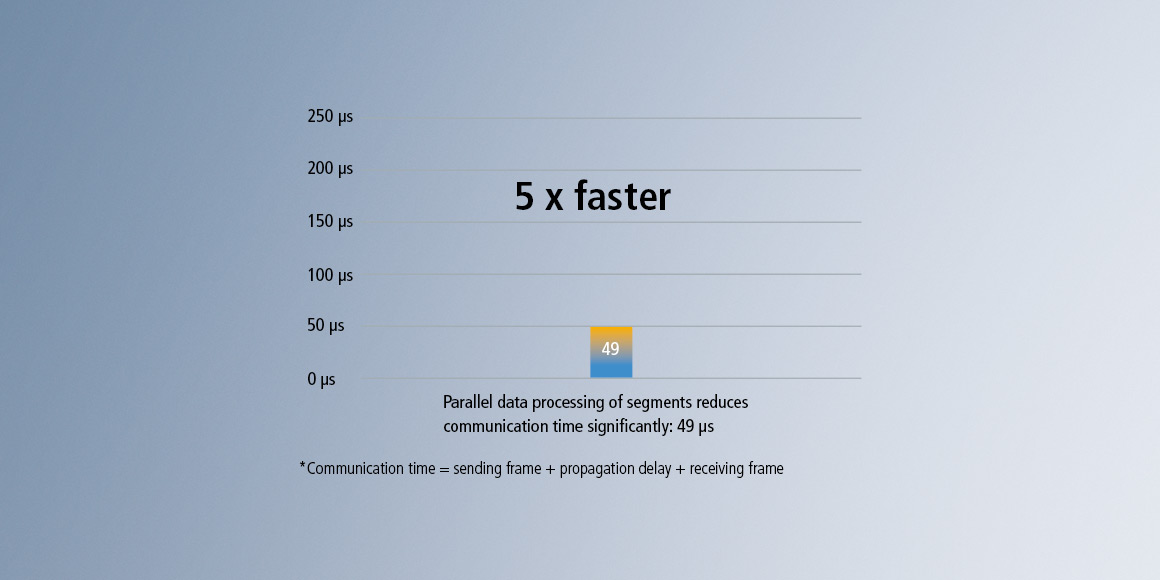
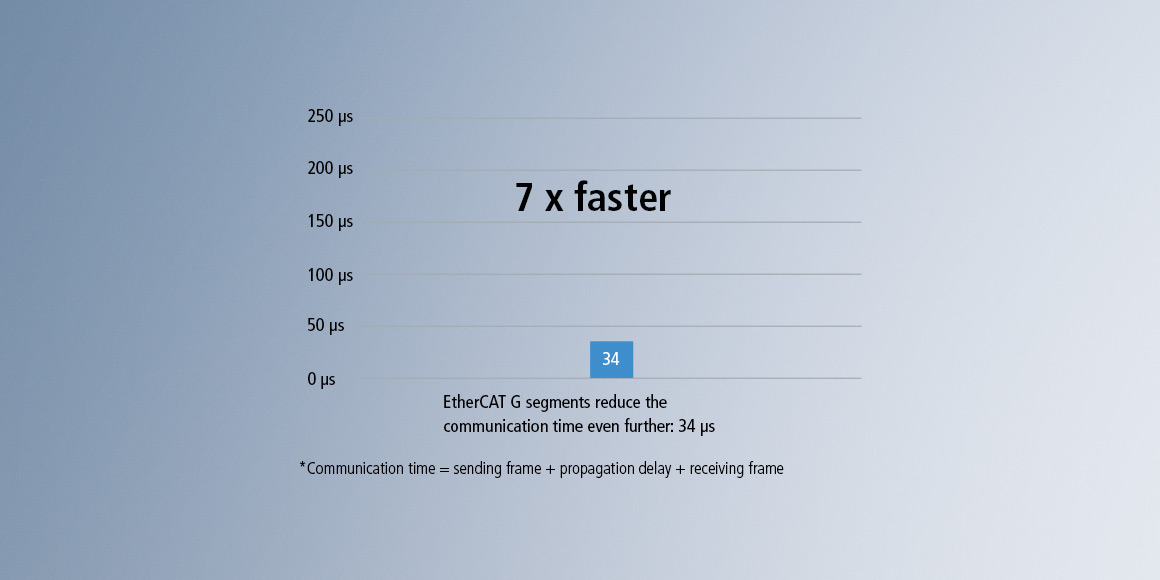
- Parallel processing throughout segments enables significantly reduced propagation delay times.
- Universal diagnostics and synchronization functions are still supported.
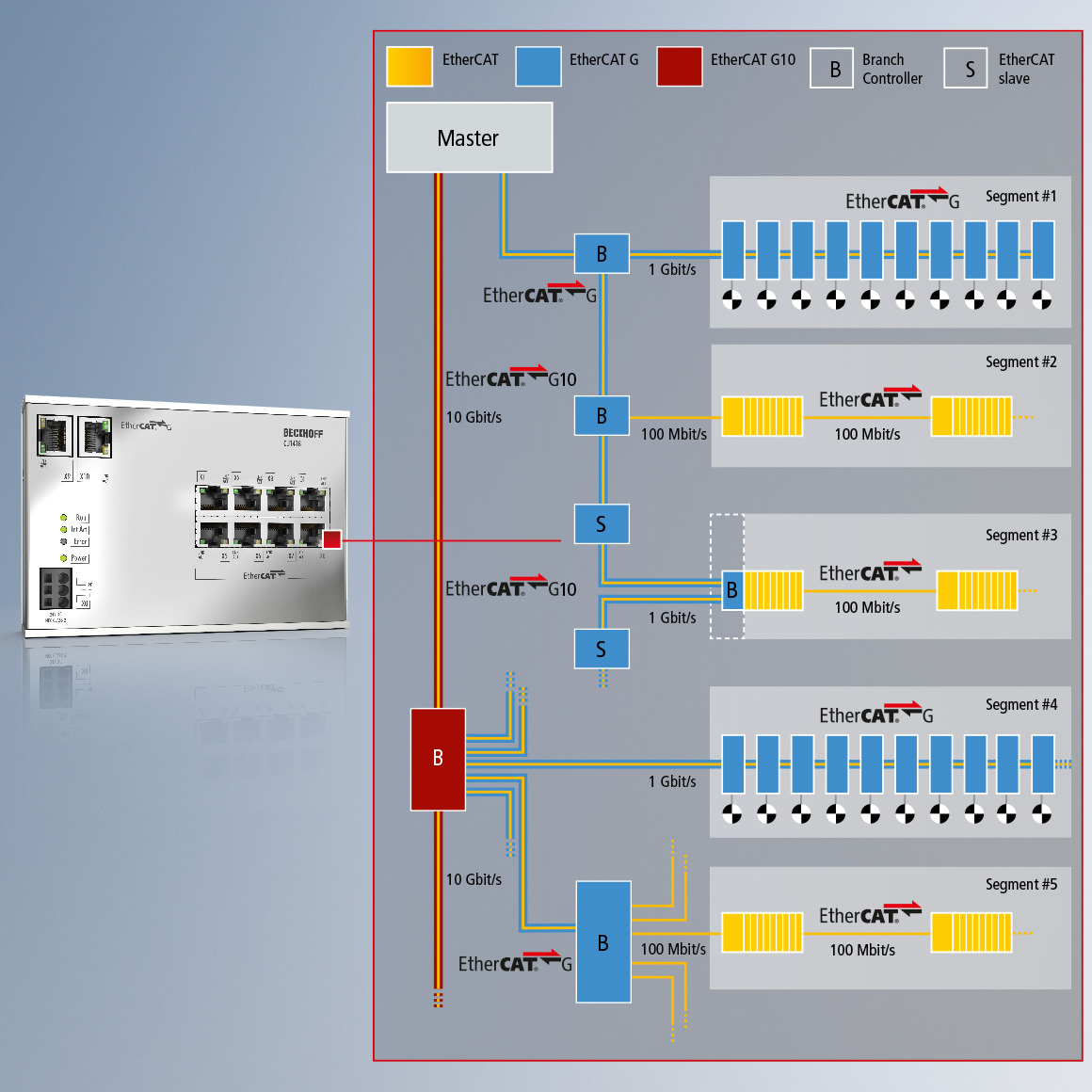
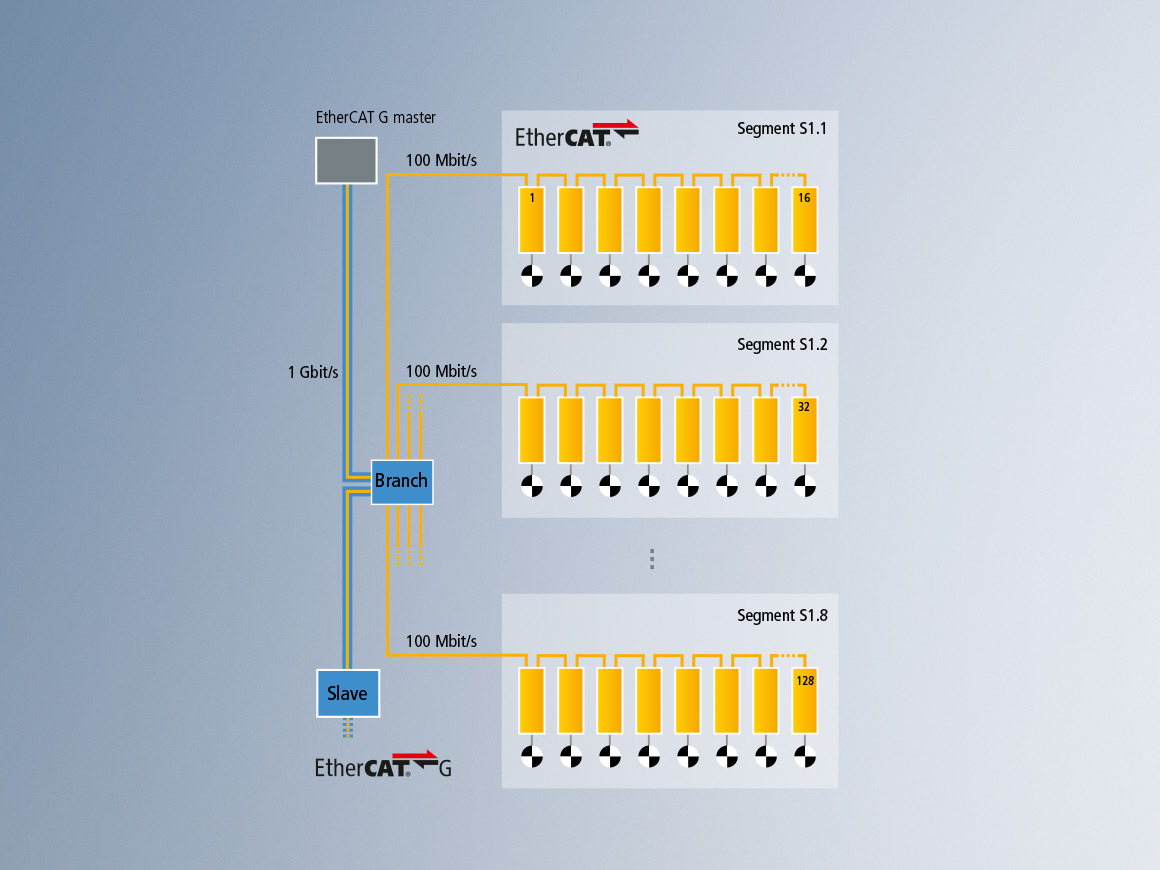
EtherCAT is the leading communication standard in industrial automation, and this means machine builders today can choose from a broad, unparalleled variety of thousands of compatible devices. This device compatibility is core for the technology expansion to EtherCAT G/G10.Designed for this purpose, the new branch model enables 100 Mbit/s Ethernet segments to be incorporated into EtherCAT G networks. Traffic forwarding onto these segments is conducted on a priority and/or time-driven basis. Because each branch is treated as a separate EtherCAT segment, telegrams need not pass through all of the segments in series. Instead, the segments are processed in parallel, significantly reducing propagation times on large networks. In the same way, combinations with branches from EtherCAT G to EtherCAT G provide benefits. As usual with EtherCAT, the branch controllers can be configured via the EtherCAT master, without the need for additional configuration tools. The branch controller supports diagnostics and distributed clocks synchronization, forwarding both transparently to connected segments. Branch controllers with multiple branches offer users immense flexibility when creating network topologies, and any existing EL, ELX and ELM terminals can be connected easily via an E-bus-equipped EtherCAT G Coupler.
System scalability from 100 to 10,000 Mbit/s
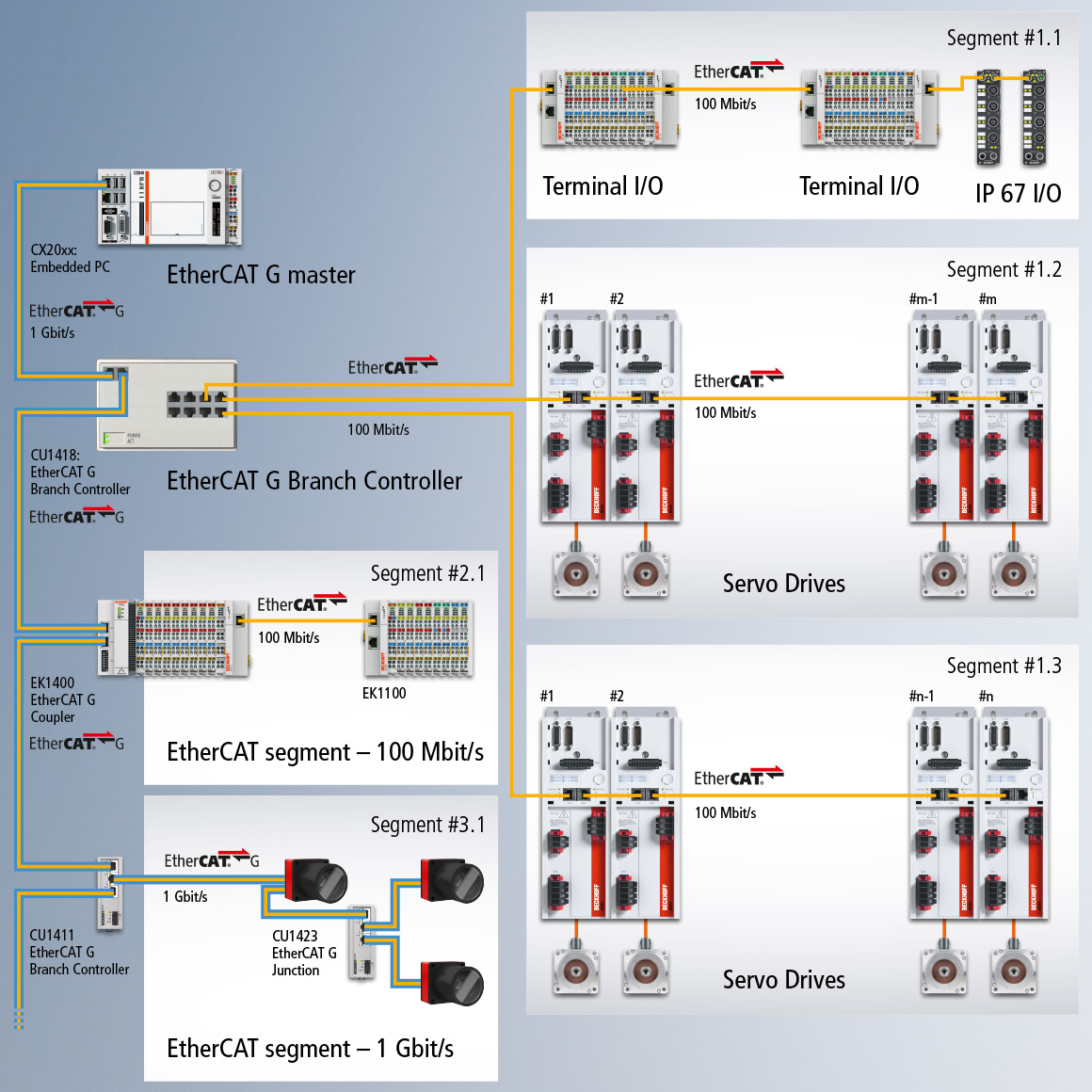
Any Beckhoff Industrial PC with a standard Gbit/s port can serve as an EtherCAT G master. TwinCAT carries out port control, and from a user’s perspective operation is no different. EtherCAT and EtherCAT G networks can be interconnected using a 1-port CU1411 branchcontroller. A branch can operate at 100 Mbit/s as well as 1 Gbit/s, depending on the devices connected.
The 8-port CU1418 branch controller supports a larger number of branches and thus a greater variety of topologies. In addition, up to eight branches can operate as independent EtherCAT or EtherCAT G segments, ensuring short cycle times, even with large numbers of connected devices. In contrast, the CU1423 EtherCAT G junction unit is designed simply to expand the network topology within a given segment without changing the transmission rate. It supports no branch functionality as such. The EK1400 EtherCAT G Coupler enables the entire variety of Beckhoff EtherCAT Terminals also for EtherCAT G networks. In addition, the bus node can be expanded using an EK1110 extension terminal and operated as independent EtherCAT segment.
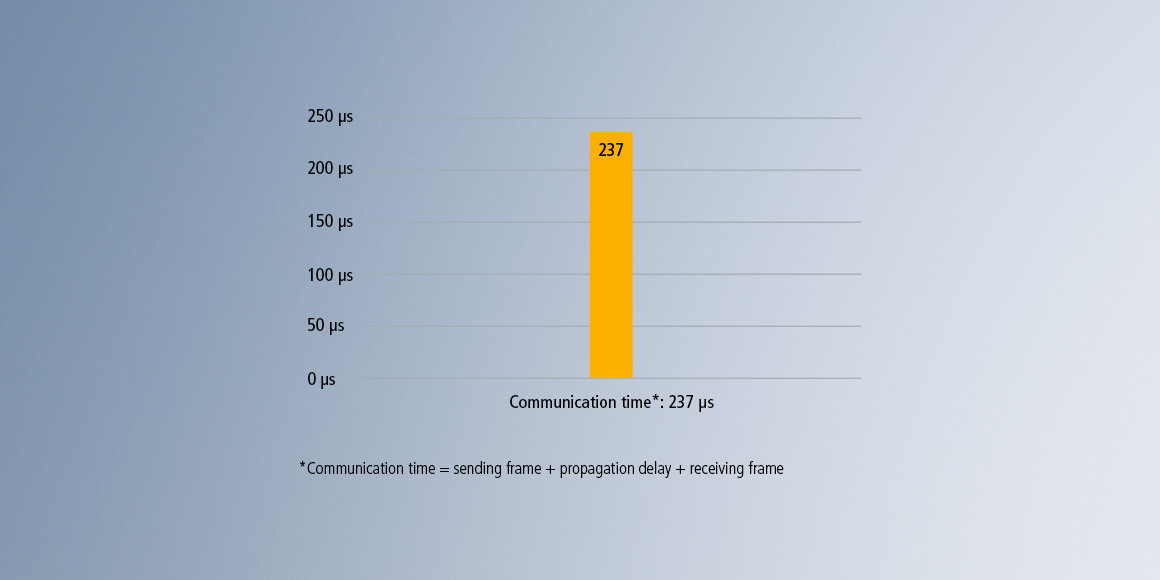
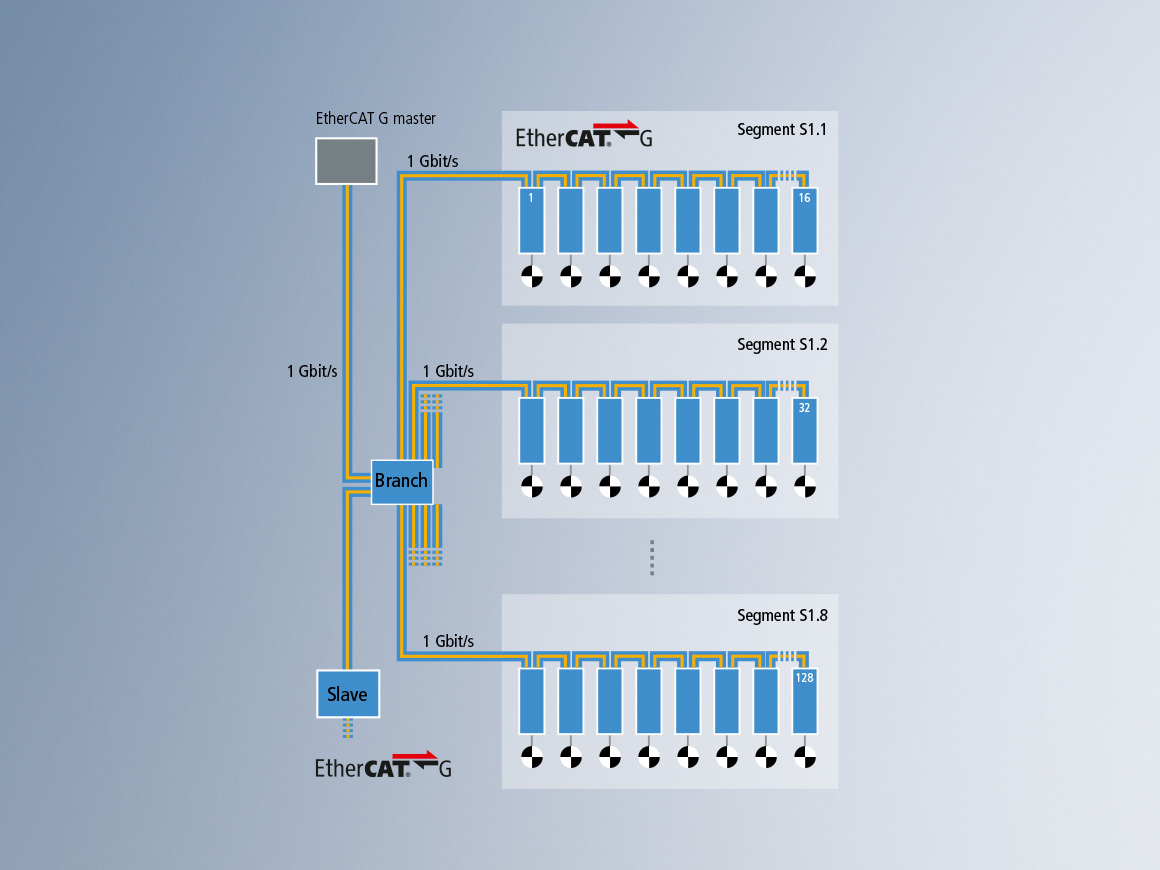
Use case 1: large-scale machine network with 128 servo axes
- 8 bytes of input data/8 bytes of output data each
- 1024 bytes IN/OUT per cycle
Use case 2: measurement technology, condition monitoring
- 200 channels ±10 V analog inputs with 100,000 samples/s (10 μs measurement interval) per channel with 1 ms cycle time
- 322 Mbit/s of user data bandwidth required
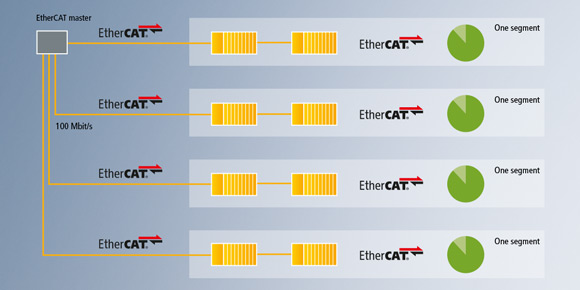
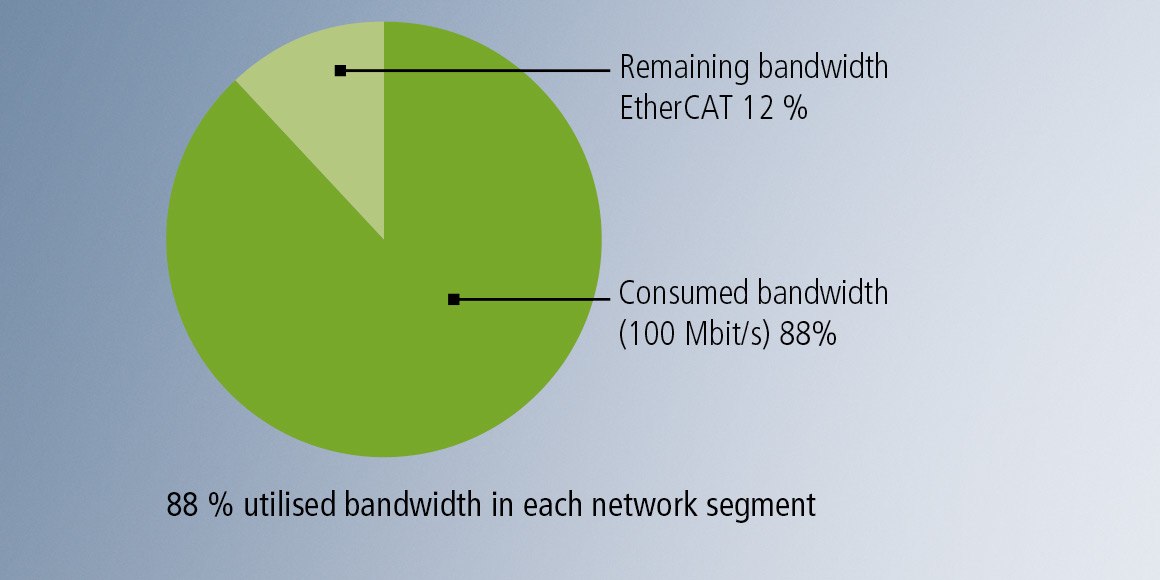
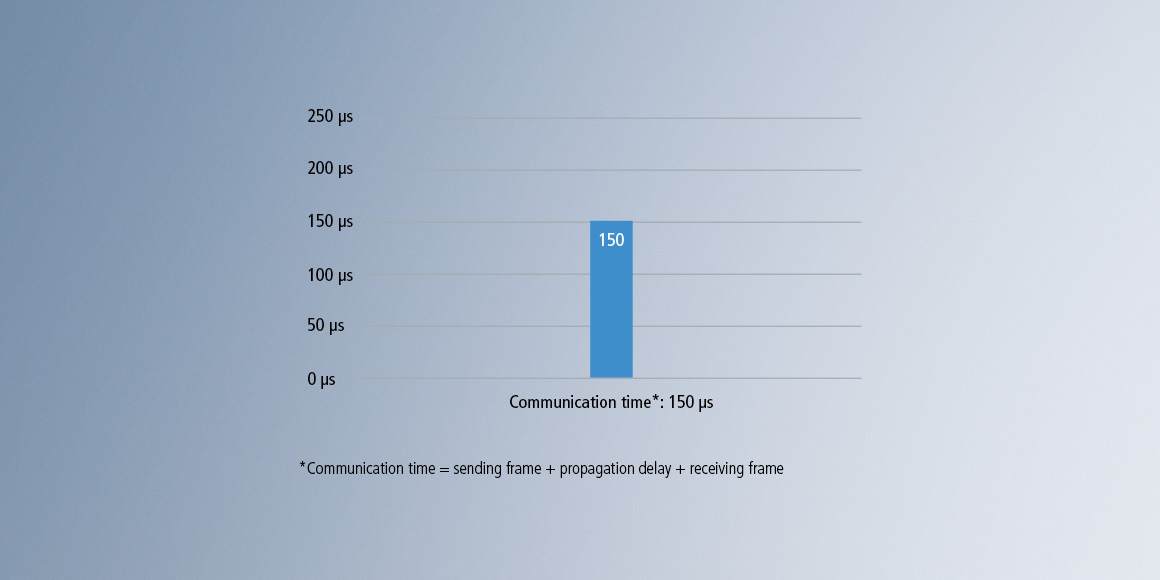
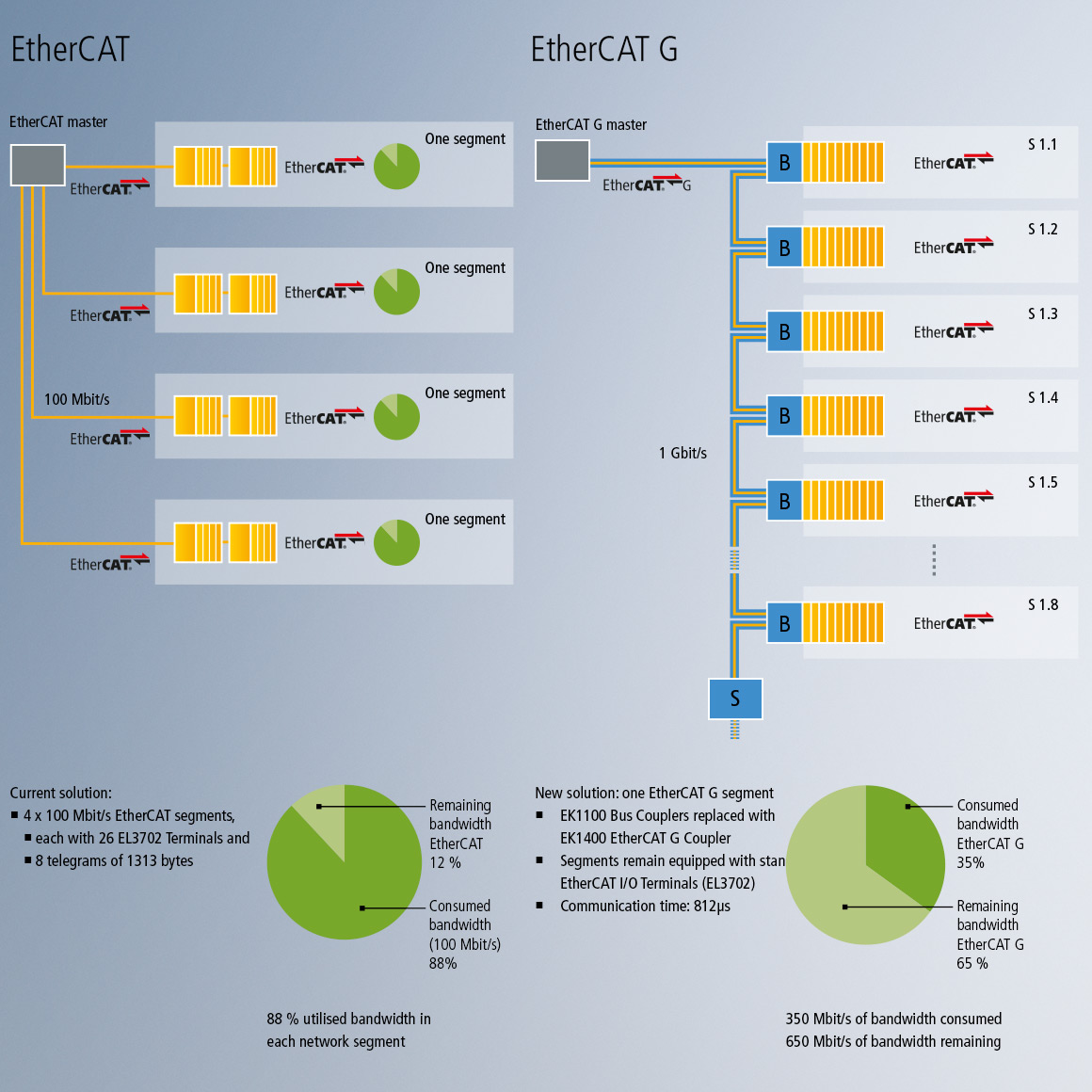
Solution with EtherCAT master
- 4 x 100 Mbit/s EtherCAT segments
- each with 26 EL3702 terminals and
- 8 telegrams of 1313 bytes
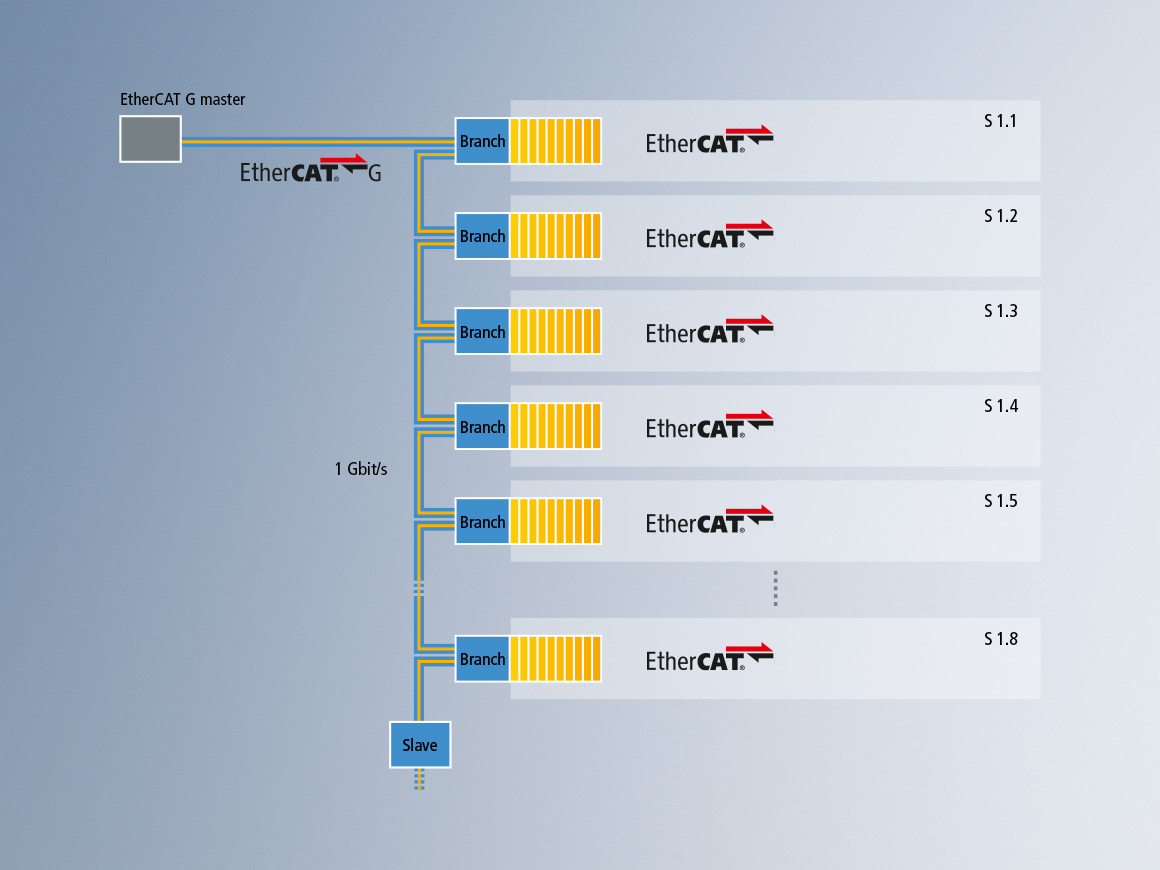
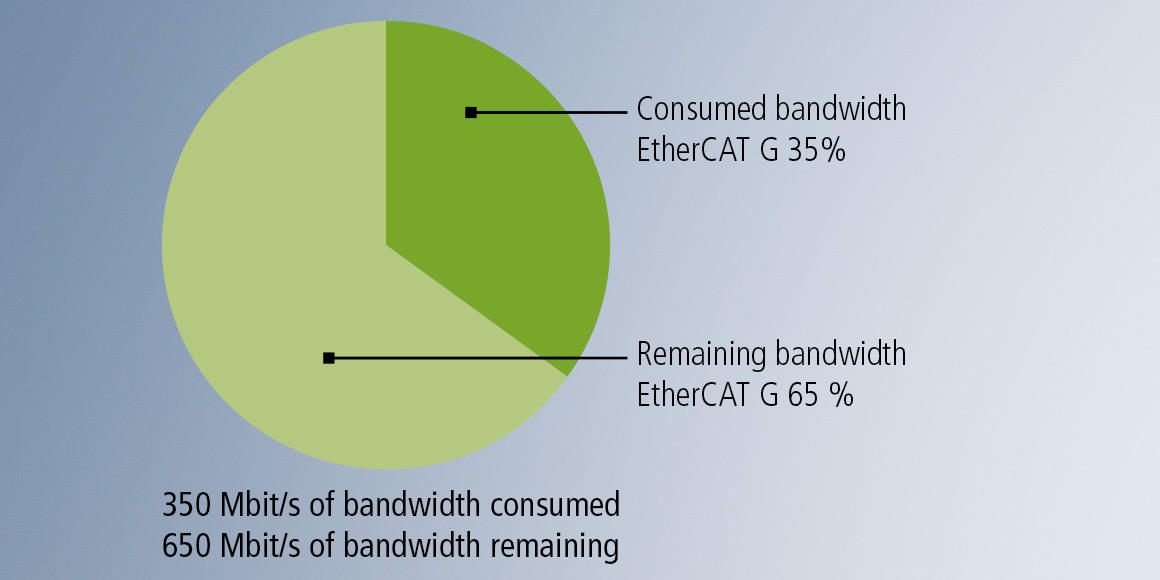
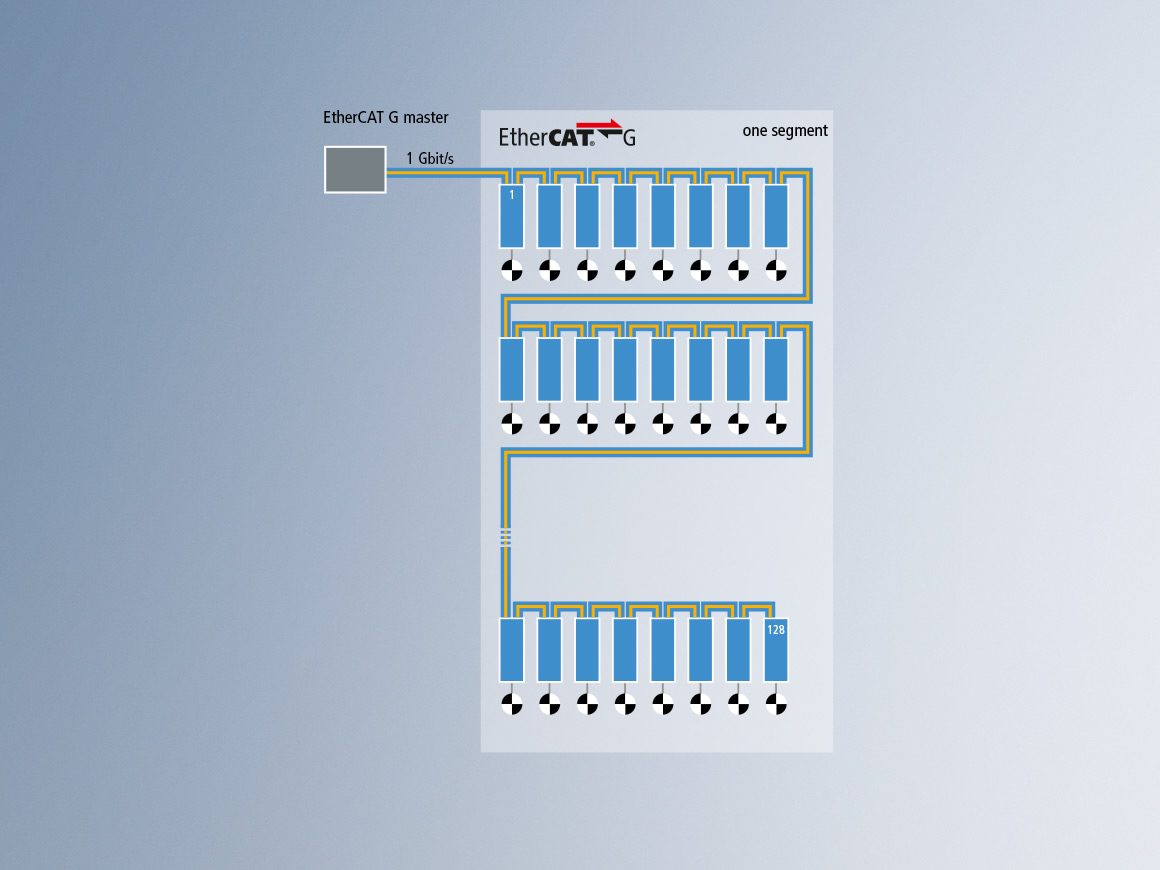
Solution with EtherCAT G master
- one EtherCAT G segment
- EK1100 Bus Couplers replaced with EK1400 EtherCAT G Couplers
- Segments remain equipped with standard EtherCAT I/O terminals (EL3702).
- communication time: 812 μs
EtherCAT G products

EK1400 | EtherCAT G Coupler
The EK1400 EtherCAT G Coupler connects EtherCAT G with the EtherCAT Terminals (ELxxxx). One station consists of an EK1400 Coupler, any number of EtherCAT Terminals and an EL9011 bus end cap or an EK1110 EtherCAT extension. The coupler provides the same functionality as a branch controller.

CU1411 | Infrastructure, 1-port branch controller, EtherCAT G, 24 V DC, RJ45
The EtherCAT G branch controllers enable transparent conversion of transmission rates of EtherCAT G and EtherCAT. The CU1411 has two marked ports for integration into an EtherCAT G network. An EtherCAT and/or EtherCAT G segment can be coupled via a further branch port.

CU1418 | Infrastructure, 8-port branch controller, EtherCAT G, 24 V DC, RJ45
The EtherCAT G branch controllers enable transparent conversion of transmission rates of EtherCAT G and EtherCAT. The CU1418 has two marked ports for integration into an EtherCAT G network. Eight EtherCAT and/or EtherCAT G segments can be coupled via a further branch port.

CU1423 | Infrastructure, 3-port junction, EtherCAT G, 1 Gbit/s, 24 V DC, RJ45
The 3-way EtherCAT G junction enables topology expansions without changes in transmission rates. Line, tree or star – EtherCAT G supports almost any topology. The 3-port CU1423 EtherCAT G junction provides a compact solutions to cascade an EtherCAT network.

FB1400 | EtherCAT G piggyback controller board
The EtherCAT G piggyback controller board offers a complete EtherCAT G connection based on a reloadable FPGA. The FB1400 is suitable for EtherCAT G connections. It is compatible with the EL9820 EtherCAT evaluation kit.

FB1450 | EtherCAT G10 piggyback controller board
The EtherCAT G piggyback controller board offers a complete EtherCAT G connection based on a reloadable FPGA. The FB1450 is suitable for EtherCAT G10 connections. It is compatible with the EL9820 EtherCAT evaluation kit.

ZK1096-8191-0xxx | Industrial Ethernet/EtherCAT G/G10 cable, Cat.6/Cat.6A, PUR, 4 x 2 x AWG26, fixed installation
M12, plug, straight, male, 8-pin, X-coded – RJ45, plug, straight, male, 8-pin