Mehr Flexibilität in der Automationsentwicklung durch Modularisierung und Erweiterungen

Durch ein neuartiges, mediatisiertes Setup kann TwinCAT nicht nur wie bisher in drei Varianten auf einem Industrie-PC installiert werden: Stattdessen können je nach Präferenz spezifische Pakete ausgewählt und anschließend installiert oder auch aktualisiert werden. Neben der Möglichkeit einer unabhängigen Aktualisierung von Komponenten profitieren Kunden gleichzeitig von schnellerer Installation und kürzeren Update-Zeiten.

TwinCAT 3.1 Build 4026 kann auch mit Microsoft Visual Studio 2022 verwendet werden. Durch den Support von Microsoft Visual Studio 2022 wird eine 64-Bit-Umgebung für das Engineering bereitgestellt, wodurch mehr Arbeitsspeicher für größere Projekte genutzt werden kann. Die von TwinCAT mitgelieferte XaeShell steht ebenfalls in einer aktualisierten Variante bereit, die auf Microsoft Visual Studio 2022 basiert. TwinCAT 3.1 Build 4026 unterstützt neben Microsoft Visual Studio 2022 auch die Versionen 2017 und 2019.
Neuerungen auf einen Blick




Eine kurze Vorstellung per Video und die Webinare zum neuen TwinCAT 3.1 Build 4026 vermitteln einen direkten Einstieg in die wichtigsten Neuerungen der Version:
- TwinCAT 3.1 Build 4026 – Was ist neu?
- TwinCAT 3.1 Build 4026 – Einführung (Webinar)
- TwinCAT 3.1 Build 4026 – SPS-Updates (Webinar)
- TwinCAT 3.1 Build 4026 – Package Management (Webinar)
Vorgängerversion TwinCAT 3.1 Build 4024
Die Vorgängerversion von TwinCAT 3.1 Build 4026 ist die Version Build 4024. Sie ist auch weiterhin gültig. Alle Eigenschaften von Build 4024 sind in der neuesten Version 4026 enthalten.
Build 4024: Gesteigerte Effizienz und Durchgängigkeit im Engineering
- Integration der Microsoft Visual Studio® 2017 Shell (TcXaeShell)
- neue Startseite mit neuem RSS-Feed mit TwinCAT-Infos
- Support von Microsoft Visual Studio 2019 (Build 4024.10 und höher)
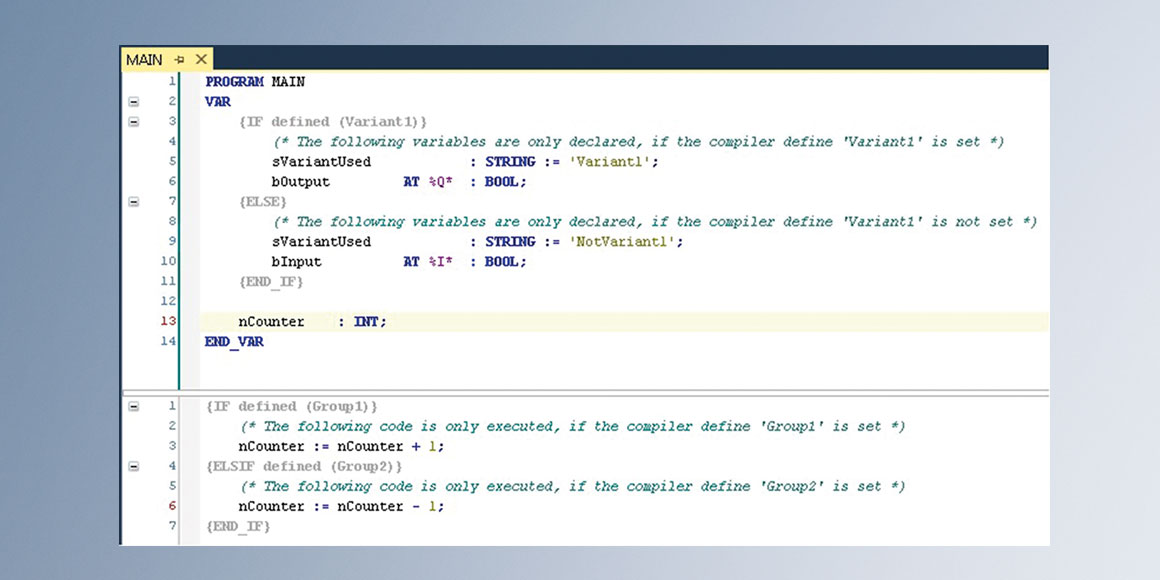
- einfache Konfiguration von Maschinenvarianten
- variantenspezifisches De-/Aktivieren von Komponenten
- variantenspezifisches Parametrieren
- abgebildet durch ‚bedingte Kompilierung‘ in der SPS

- Mehrere Programmierer können gleichzeitig an einem SPS-Projekt arbeiten.
- integrierter Workflow
- verringert die Inbetriebnahmezeit
- hohe Nachverfolgbarkeit