




Beckhoff als Spezialist für PC-based Control ergänzt mit TwinCAT Vision die seit vielen Jahren erfolgreiche TwinCAT-Welt um die integrierte Bildverarbeitung. Die Bildverarbeitung nimmt einen immer größeren Stellenwert ein und wird für Maschinenbauer und deren Kunden zunehmend zum entscheidenden Qualitätskriterium: bei Industrie-4.0-Anwendungen, für die Qualitätsoptimierung oder für Track-and-Trace-Funktionalitäten. TwinCAT Vision erweitert softwareseitig das Angebot der Vision-Hardware zu einer kompletten Lösung für die industrielle Bildverarbeitung.
Der Ansatz der PC-basierten Steuerungstechnik bietet hier die ideale Lösung: Neben SPS, Motion Control, Robotik, Highend-Messtechnik, IoT und HMI wird mit TwinCAT Vision die Bildverarbeitung auf einer einheitlichen Steuerungsplattform integriert. Das vereinfacht das Engineering deutlich, weil die Konfiguration bzw. die Programmierung in der gewohnten Umgebung erfolgt. Zugleich lassen sich alle aus der Bildverarbeitung abgeleiteten Steuerungsfunktionen in einer Runtime exakt in Echtzeit synchronisieren. Latenzzeiten entfallen; alle Bildalgorithmen werden in Echtzeit ausgeführt. Hier zeigt sich der enorme Qualitätsvorsprung gegenüber herkömmlichen Vision-Lösungen: Maschinenbauer können mit TwinCAT Vision alle Bildverarbeitungsaufgaben direkt in die Gesamtsteuerung integrieren. Das Ergebnis sind zeitgemäße Maschinenkonzepte, die künftigen Marktanforderungen entsprechen und die Wettbewerbsfähigkeit und Investitionssicherheit der eigenen Produkte erhöhen.
Vorsprung durch TwinCAT Vision
- Erhöhte Wettbewerbsfähigkeit: Mit einer in die Gesamtsteuerung integrierten Bildverarbeitung lassen sich Maschinen effizienter gestalten. Überlegene Echtzeitanwendungen werden um Vision erweitert.
- Vereinfachte Industrie-4.0-Anwendungen: Die Integration aller Funktionalitäten von SPS, Motion, Messtechnik und Vision mit IoT und Analytics auf einer Steuerungsplattform vereinfacht die Umsetzung von Industrie 4.0.
- Erhöhte Produktionseffizienz: Hochpräzise Vermessung sowie eine exakte optische Inspektion sichern die Einhaltung der Prozessparameter.
- Qualitätssicherung: Anwendungen wie Track & Trace ermöglichen die Nachverfolgbarkeit der Produktqualität.
- Offenheit: Das Prinzip der offenen Steuerungstechnik wird konsequent fortgesetzt.
- Hardwareunabhängigkeit: TwinCAT Vision unterstützt sowohl Zeilen- als auch Flächenkameras mit GigE-Vision-Schnittstelle.
- Softwareerweiterungen: Auf die Rohdaten der Kamera kann jederzeit zugegriffen werden. Eigene Bildverarbeitungsalgorithmen sind einfach integrierbar.
- Cloud-Anbindung: Die Vision-Integration auf der Steuerungsplattform TwinCAT ermöglicht eine direkte Verknüpfung mit TwinCAT IoT und TwinCAT Analytics. Dies stellt eine einfache Cloud-Kommunikation sicher, erlaubt den Zugriff auf cloudbasierte Dienste und vereinfacht Industrie-4.0-Anwendungen.
- Echtzeit: Die Integration von SPS, Motion Control, Robotik, Highend-Messtechnik und Vision auf einer Plattform ermöglicht überlegene Echtzeitanwendungen, mit denen die Effizienz der Maschine deutlich erhöht werden kann. Unnötige Wartezeiten für Motion oder Robotik werden vermieden.
1234
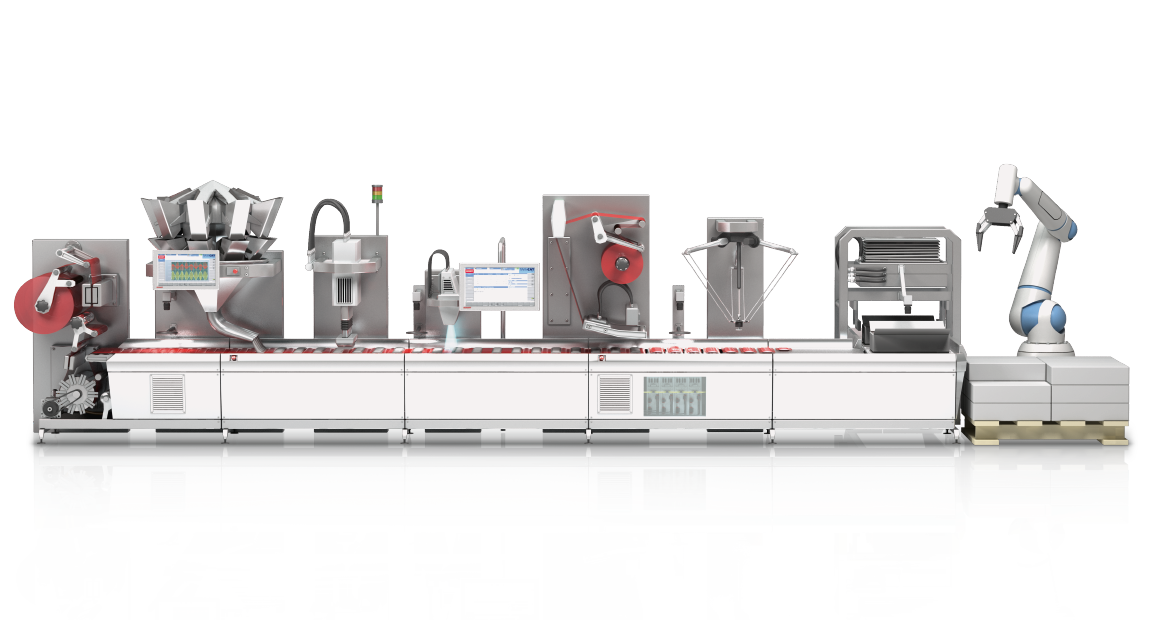
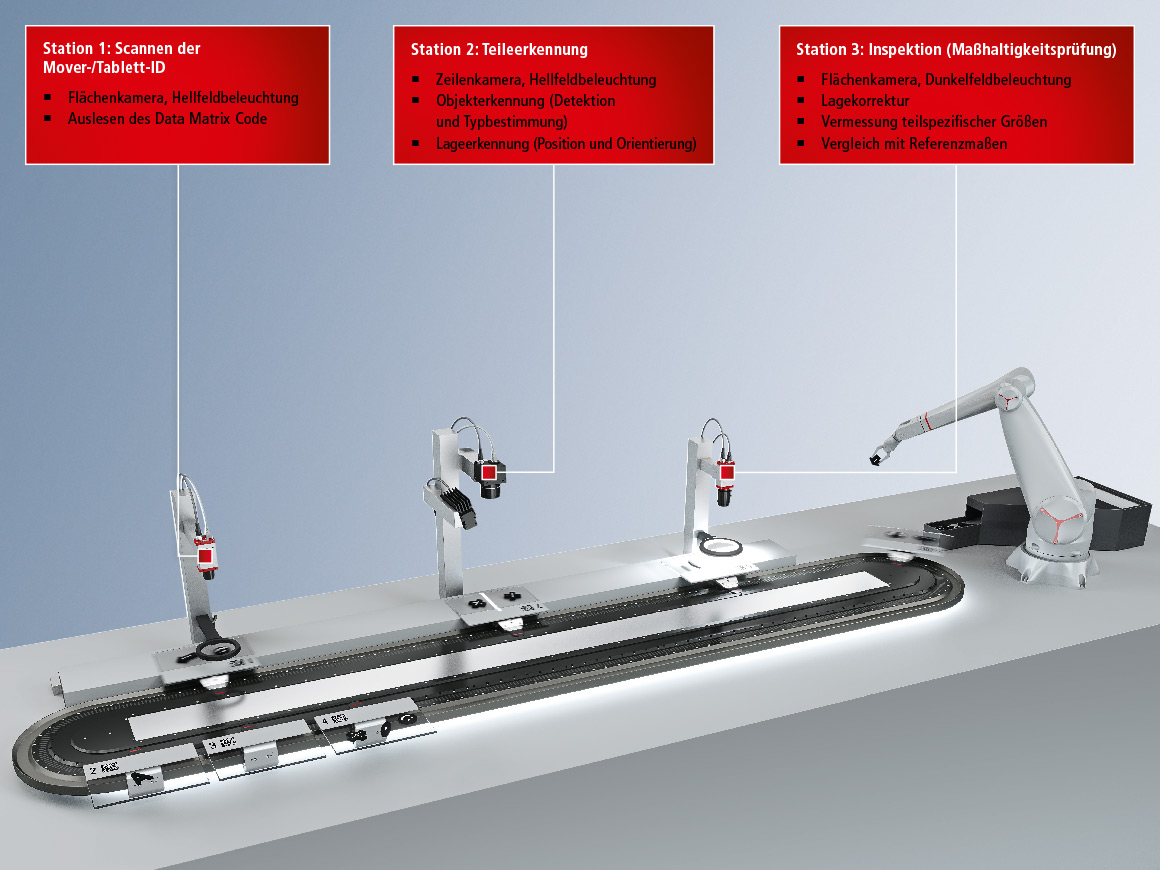
TwinCAT Vision in der Anwendung
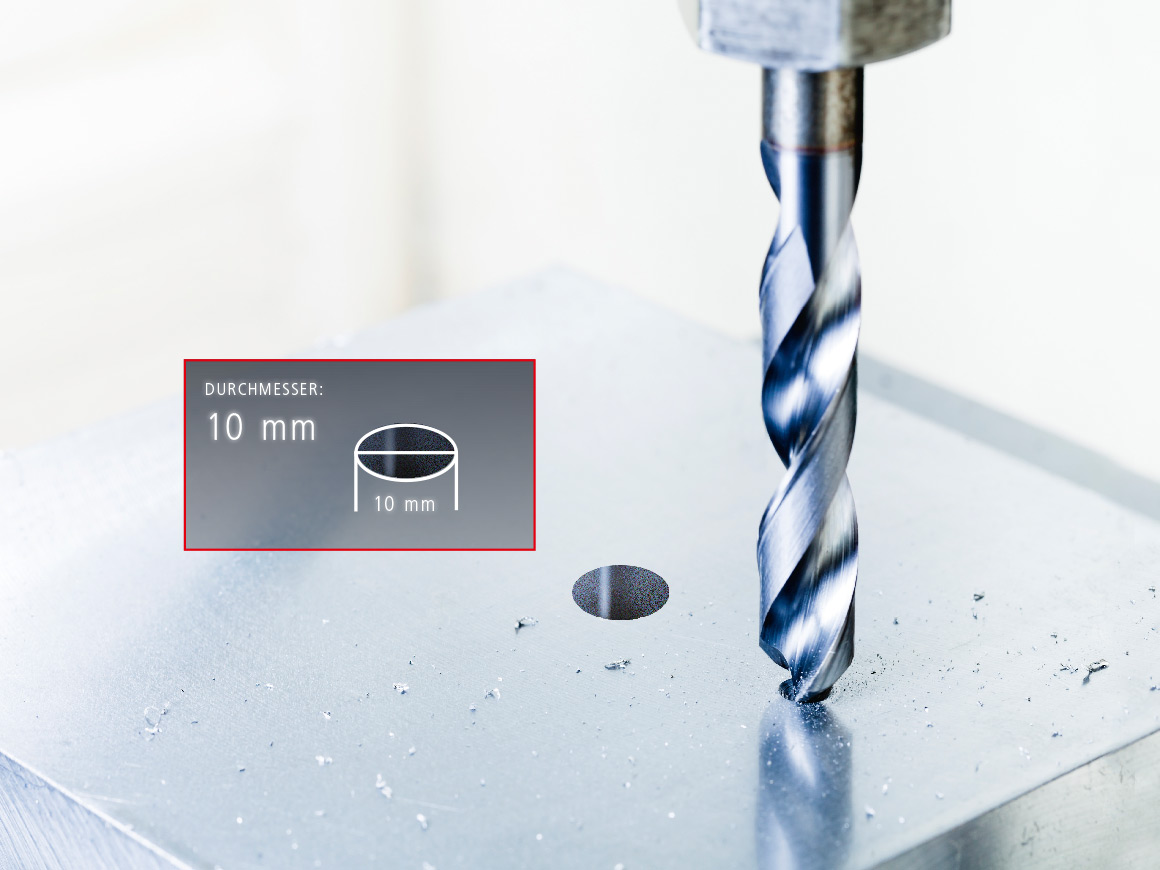
Measurement
- Abstände
- Durchmesser
- Rundheit

Detection
- Mustererkennung
- Lageerkennung
- Farberkennung
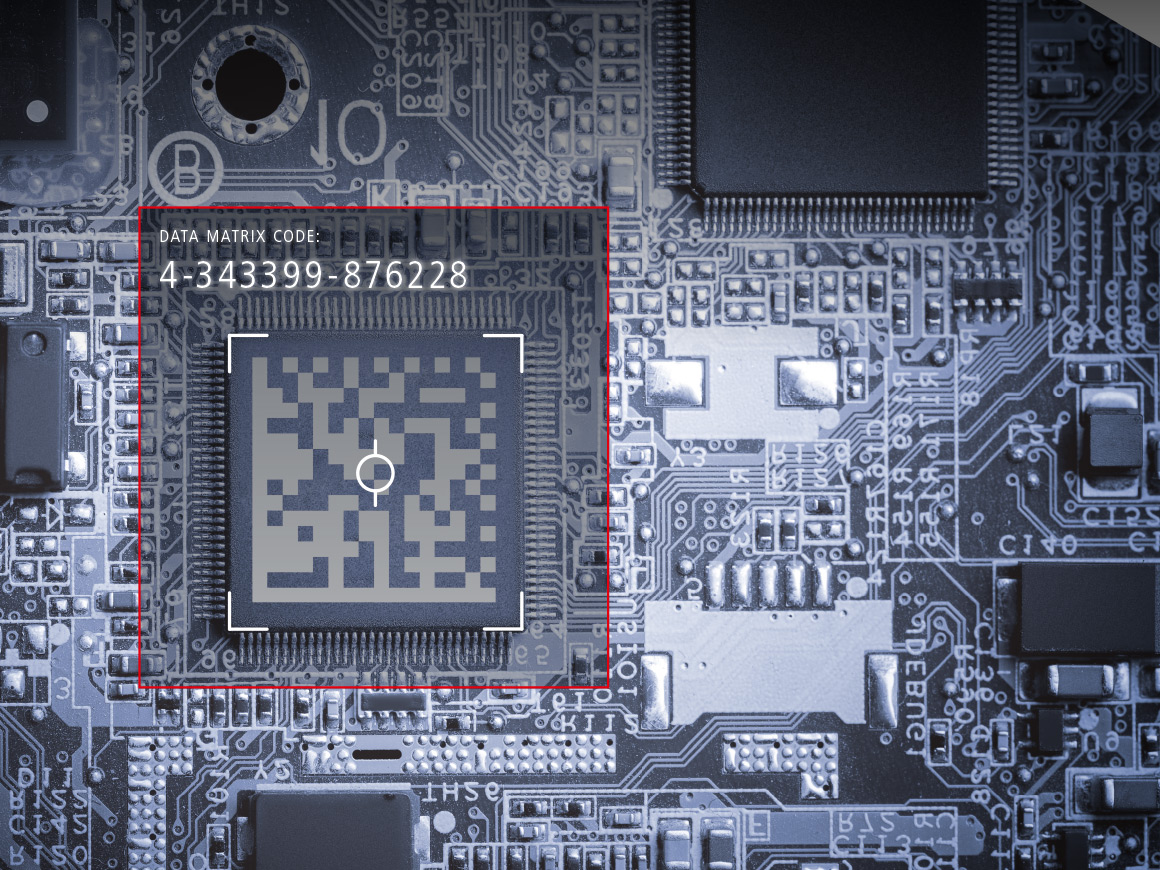
Identification
- Data Matrix Code
- Barcode
- QR-Code

Monitoring
- Prozessvisualisierung
- Blick in die Maschine
- vereinfachter Service
- vereinfachte Wartung
Modular strukturiert: vom Engineering bis zur Runtime
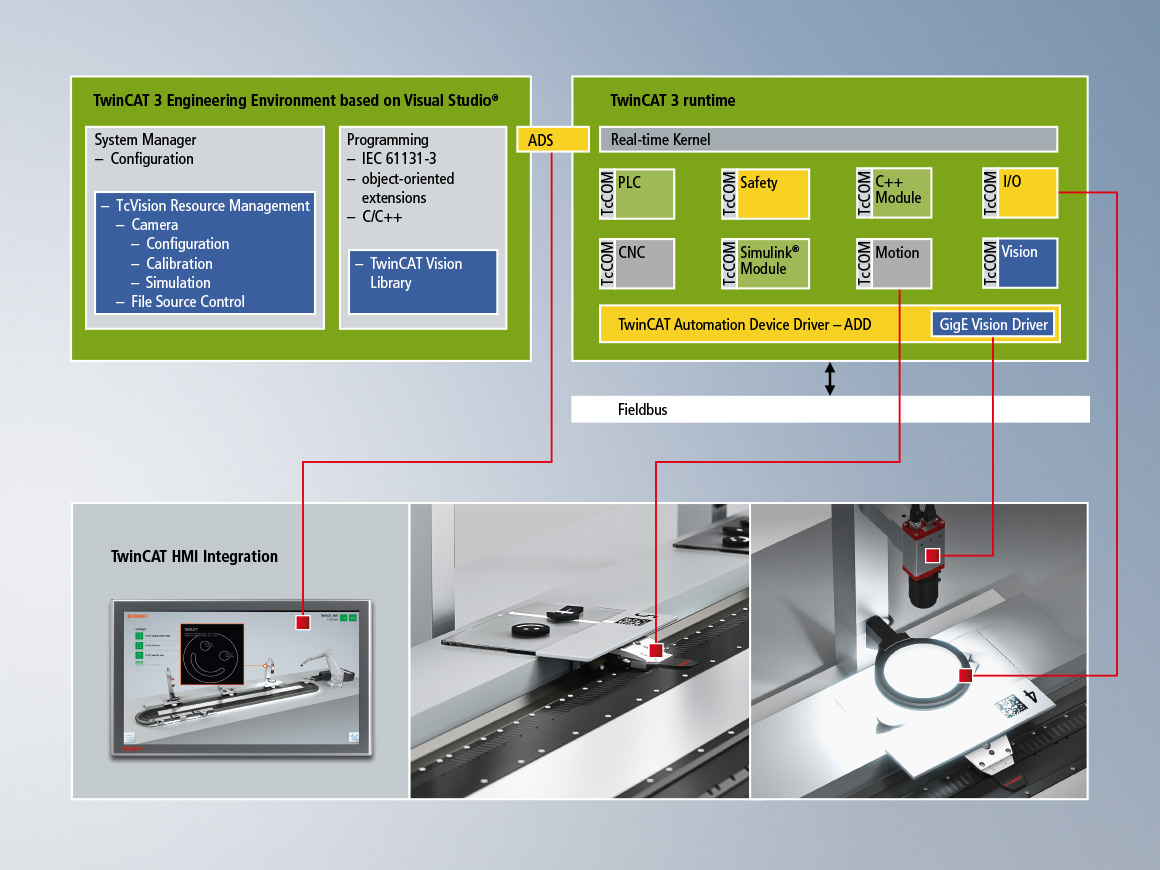
TwinCAT Vision ist direkt in die Engineeringumgebung von TwinCAT integriert. Unter dem neuen Knoten Vision können Kameras einfach eingebunden und konfiguriert werden. Auch die Kalibrierung der Kamera kann hier erfolgen. Zudem ist es möglich, einen Kamera-Stream aufzuzeichnen und anstelle des Live-Streams der Kamera wieder einzuspielen. Alternativ können auch Bilder verschiedenster Formate geladen werden. Der Entwicklung des Bildverarbeitungsablaufs steht somit auch ohne Kamerazugriff nichts im Wege. Der Ablauf der Bildverarbeitung wird direkt in der SPS in den SPS-Programmiersprachen implementiert. Eine umfangreiche Bibliothek mit verschiedensten Bildverarbeitungsalgorithmen steht hierfür zur Verfügung. Durch die Integration in die SPS erfolgt die Ausführung der Analysekette in der TwinCAT Laufzeit. Dies ermöglicht eine verzögerungsfreie Kommunikation zu anderen Teilen der SPS, wie den Motion-Komponenten. Alle bekannten Möglichkeiten des Debuggings in der SPS können genutzt werden. Jederzeit lassen sich Zwischenergebnisse im Engineering oder im TwinCAT HMI anzeigen.
Vereinfachtes Engineering, optimierte Runtime:
- einfache Kamerakonfiguration
- Programmierung in SPS-Programmiersprachen
- Analysekette komplett in der SPS
- verzögerungsfreie Weiterverarbeitung
Einfache Vision-Konfiguration in gewohnter Umgebung
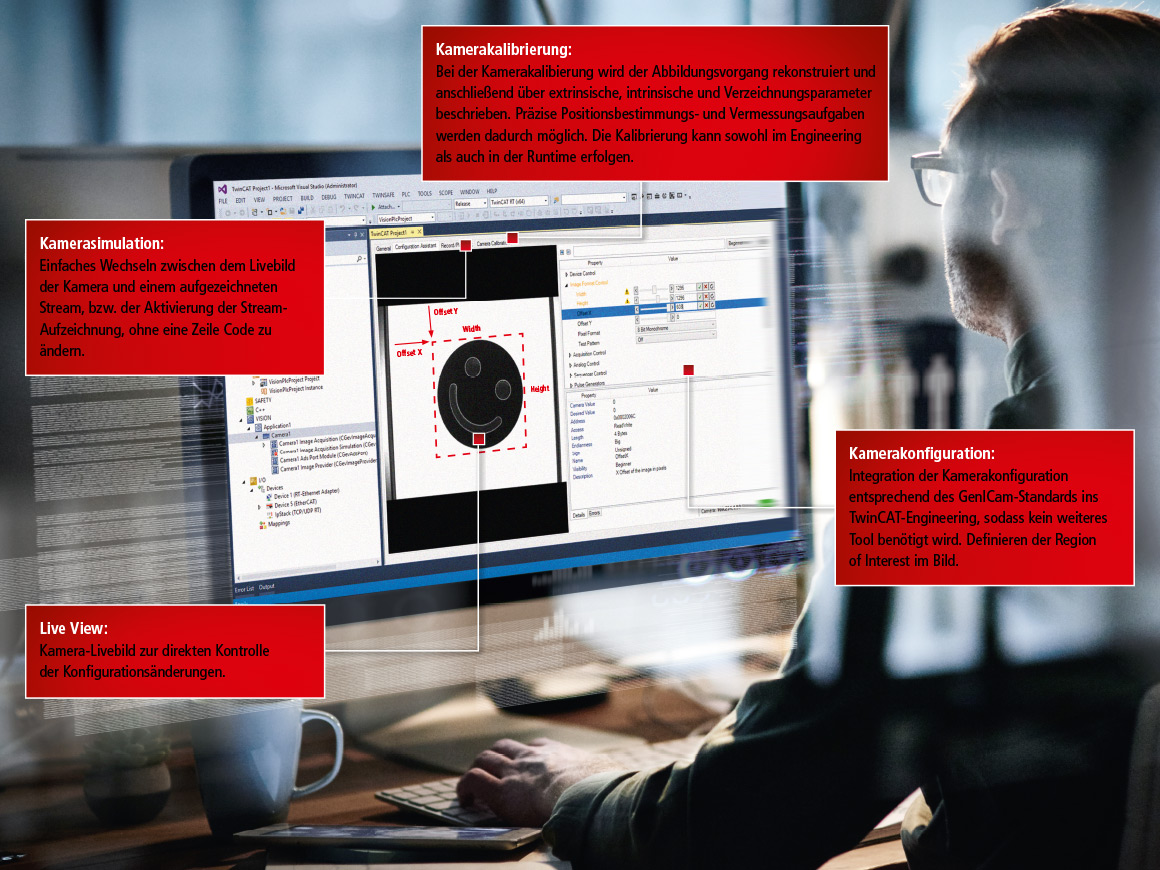
Neben der Konfiguration von Motion und I/O kann mit TwinCAT Vision auch die Konfiguration von Kameras im TwinCAT-Engineering erfolgen. Unter dem neuen Vision-Knoten können GigEVision-Kameras eingebunden und entsprechend des GenICam-Standard konfiguriert werden. Alle Kameraeinstellungen sind so möglich und können direkt im Kamera-Livebild überprüft werden. Darüber hinaus kann auch die Kalibrierung der Kamera im Engineering erfolgen. Dabei kann zwischen unterschiedlichen – auch selbstdefinierten – Kalibriermustern gewählt werden. Auch hier lässt sich das Ergebnis direkt kontrollieren. TwinCAT Vision ist vollständig in TwinCAT und Visual Studio® eingebunden. Alle Features, wie Docking Windows und Sourcecode-Verwaltungssysteme, können genutzt werden.
Konfiguration und Programmierung in einem Tool:
- Kamerakalibrierung in Engineering und Runtime: Bei der Kamerakalibierung wird der Abbildungsvorgang rekonstruiert und anschließend über extrinsische, intrinsische und Verzeichnungsparameter beschrieben. Präzise Positionsbestimmungs- und Vermessungsaufgaben werden dadurch möglich. Die Kalibrierung kann sowohl im Engineering als auch in der Runtime erfolgen
- Integrierte Kamerakonfiguration: Integration der Kamerakonfiguration entsprechend des GenICam-Standards ins TwinCAT-Engineering, sodass kein weiteres Tool benötigt wird. Definieren der Region of Interest im Bild.
- Live View: Kamera-Livebild zur direkten Kontrolle der Konfigurationsänderungen.
- Kamerasimulation: Einfaches Wechseln zwischen dem Livebild der Kamera und einem aufgezeichneten Stream, bzw. der Aktivierung der Stream-Aufzeichnung, ohne eine Zeile Code zu ändern.
Vision und alle Steuerungsfunktionen: für eine Plattform programmiert
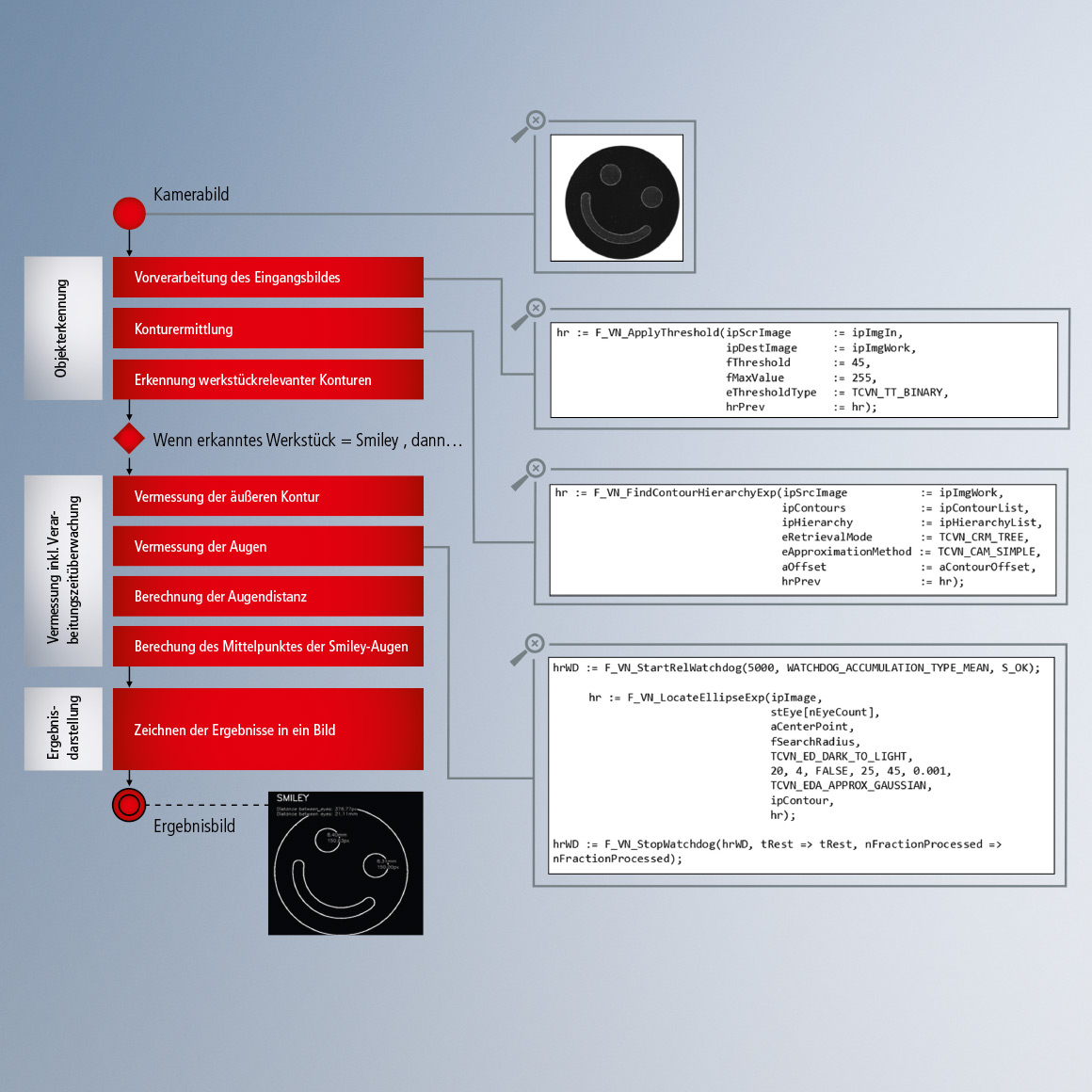
Die Programmierung der Bildauswertung erfolgt innerhalb der SPS. Aus einer umfangreichen Bibliothek können verschiedene Funktionsbausteine und Funktionen ausgewählt werden: Es stehen Funktionen für Konturerkennung, Farberkennung, Keypointfeatures und Messaufgaben zur Verfügung. In der SPS können den Bildern auch weitere Informationen, wie z. B. eingebettete Linien oder Texte, hinzugefügt werden. Zu jedem Zeitpunkt der Analysekette kann ein Zwischenstand als Bild in der Engineeringumgebung oder im TwinCAT HMI angezeigt werden. Natürlich können auch die aus der SPS bekannten Debugmöglichkeiten genutzt werden. Monitoring von Variablen und das Setzen von Breakpoints gehören dazu. Daneben können Änderungen des Codes über einen Online-Change auch für Bildverarbeitungsalgorithmen durchgeführt werden.
Alle Funktionen kombiniert:
- Objekterkennung
- Vermessung inkl. Überwachung der Verarbeitungszeit
- Ergebnisdarstellung
Alle Anwendungen in Echtzeit synchronisiert: Motion, Robotik, Vision
Durch die Ausführung der Bildverarbeitungsalgorithmen in derselben Umgebung wie SPS, Motion und Robotik, lassen sich Aufgaben einfach synchronisieren. Der Zeitpunkt einer Bildaufnahme ist genau bekannt – eventuell durch einen Trigger – und kann einfach in einen zeitlichen Zusammenhang mit der Position einer Achse oder eines Roboters gebracht werden. Durch die Integration der Bildverarbeitung in TwinCAT kann das Engineering vereinfacht werden. Alles kann in einem Tool komfortabel konfiguiert und programmiert werden. Damit bleibt das Know-how für die Bildverarbeitung beim Maschinenbauer. Durch die Abarbeitung der Bildverarbeitungsalgorithmen in der gleichen Laufzeit, im gleichen Takt werden Verzögerungen durch die Kommunikation vollständig eliminiert. Dadurch können Prozesse deutlich optimiert werden.
Produkte

Kameras
Robuste Kameras mit hochflexiblen Montageoptionen und einer Bandbreite von bis zu 2,5 GBit/s bieten ein auf Industrie-PCs abgestimmtes Leistungsspektrum.

